モデル予測制御(MPC)の応用 ~ アダプティブ・クルーズ・コントロールとセンサーフュージョン
出典シリーズ: モデル予測制御(MPC)のビデオシリーズ
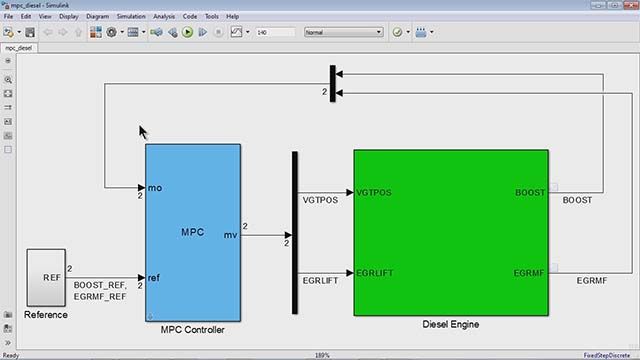
ADAS/自動運転システムへのモデル予測制御(MPC)の応用に注目します。アダプティブ・クルーズ・コントロール(ACC)にMPCを適用し、センサーフュージョンと組み合わせたフィードバック制御システムのシミュレーション例について紹介します。Simulinkは、アルゴリズムはもちろんのこと車両運動やセンサーを含むACCシステム全体のモデル化、閉ループでのテスト・評価を可能とし、アドバンストなアルゴリズム開発の生産性を向上させます。
各専用ツールは、ADAS/自動運転システムの開発を強力に後押しします。Model Predictive Control ToolboxはMPCコントローラの設計を支援します。Automated Driving Toolboxはセンサーフュージョンアルゴリズムの設計を支援します。また、センサーモデルや道路・周辺車両のシナリオ作成機能を提供します。Embedded Coderを使うことで、モデルからCコードを自動生成し、アルゴリズムをソフトウェアテストやハードウェア実装へ展開することができます。
公開年: 2018 年 8 月 14 日