运动系统的控制优化设计–以四连杆机构控制为例
演讲主题: 运动系统的控制优化设计–以四连杆机构控制为例-2008年12月17日 (星期三)
主讲人:童元鍼,业务及工程部经理,钛思科技
背景:
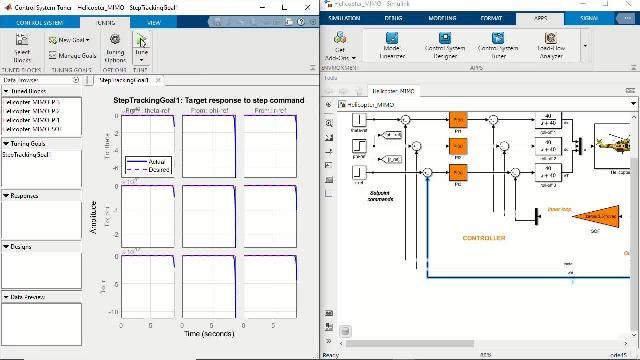
本次网络研讨会将说明如何利用Simulink®作为运动系统控制的设计平台,探讨机械和电子系统间交互作用的复域建模行为,参加者将了解如何运用相关工具更快地执行前馈与回授控制设计。
相关产品:
Simulink, SimMechanics, SimPowerSystems, Control System Toolbox, Simulink Control Design, Simulink Design Optimization
目标听众:
制造自动化方面的工业设备开发工程师
受益:
Simulink提供复域和控制系统设计绝佳的建模环境,以及优化功能。在Simulink环境中开发或仿真控制系统,可协助更有效地建立硬件间交互作用的模型,并提出更缜密的控制法则,与传统只能利用硬件仿真系统结果相比,Simulink有助于提升模拟效果和优化执行效能。
在演讲和演示之后将会有一个问答环节。
录制日期: 2008 年 12 月 18 日
特色产品