Manual and Automatic Tuning Methods | Understanding PID Control, Part 6
From the series: Understanding PID Control
Brian Douglas
The previous video showed three different approaches to developing a mathematical model of your physical system. Now that we have this model, we can use it to tune a PID controller that will work to control the physical system.
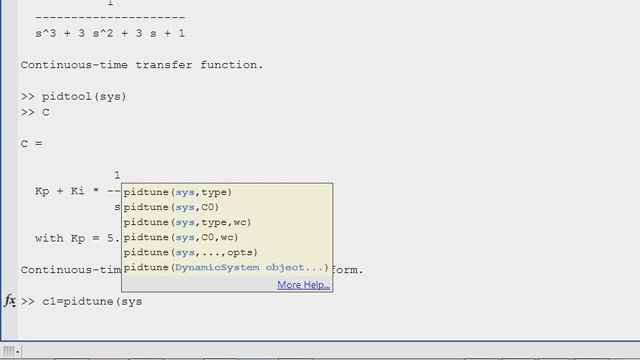
PID tuning can be thought of in two ways: Adjusting the three path gains (Kp, Ki, and Kd), or placing two moveable zeros and adjusting the loop gain to get the desired response. This video shows how thinking of PID tuning using moveable zeros allows you to approach the problem with loop shaping and pole placement methods. These methods provide a more systematic approach over the brute force method of guessing gain values and checking the response.
In addition to manually tuning a controller, this video introduces how automatic tuning can be a way to quickly get a controller design to meet the system requirements.
Published: 1 Aug 2018