You are already signed in to your MathWorks Account. Please press the "Submit" button to complete the process.
Keynote: Transforming Software Development for Future Autonomous, Electrified, and Connected Commercial Vehicles
Micha Muenzenmay, Robert Bosch Mouham Tanimou, Robert Bosch
Innovative use cases in the field of autonomous, electrified, and connected commercial vehicles, as well as changing usage, lead to the need to add functionality after production.
Today, software features are defined during development. Later, new functionality or application updates can only be done in the service workshop or by specialist on site, if at all.
To change this situation, Bosch develops an open ecosystem starting from the development environment in the cloud up to the global management, licensing, and distribution of software applications, with new simulation and model-based design approaches woven into the workflow. The ecosystem supports a uniform function development approach throughout the lifecycle of the vehicle, from concept through aftermarket.
This approach enables the introduction of customer-specific functionality, on short notice and at any time worldwide. A Firmware-Update-Over-The-Air (FOTA) as well as adding dedicated software applications (Software-Update-Over-the-Air, SOTA) is supported.
This presentation discusses the basic approach and development steps, and gives examples.
Keynote: A Look to the Future with Model-Based Design
Andy Grace, MathWorks
Massive change is under way in the automotive industry with trends in vehicle electrification, autonomous driving, and wireless connectivity. In this talk, Andy Grace, who leads the development of products for Model-Based Design at MathWorks, shares his vision for increased usage of simulation, design automation, and artificial intelligence to accelerate these trends.
Building Battery State-of-Health Estimation Pipelines for Electrified Vehicles
Nilesh Kulkarni, NIO Inc.
This talk gives an overview of battery state-of-health (SOH) estimation and prognostics modeling that uses data generated from the vehicle model in the cloud. The vehicle model is comprised of a Simulink® based electric vehicle model that includes Li-Ion cell chemistry-based battery models. While building battery state-of-health pipelines, it is difficult to capture real data from the vehicle in various driving conditions. We took the approach to leverage a calibrated Li-Ion Cell Chemistry model to generate the required data in various driving conditions. We pushed this data to the cloud, then had the data pipelines pick this data and do all the downstream processing. This enabled us to build the data pipelines and the analytics stack without having extensive vehicle data. As we have now started getting real data, we are validating this analytics stack. This talk also discusses leveraging the Simulink code-generation feature to generate C-code and its feasibility for real-time in-vehicle SOH estimation.
System Simulation for Robust Calibration and Diagnostics
Mert Zorlu, Cummins Inc.
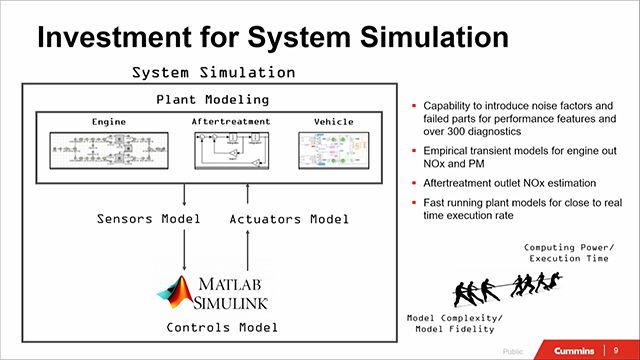
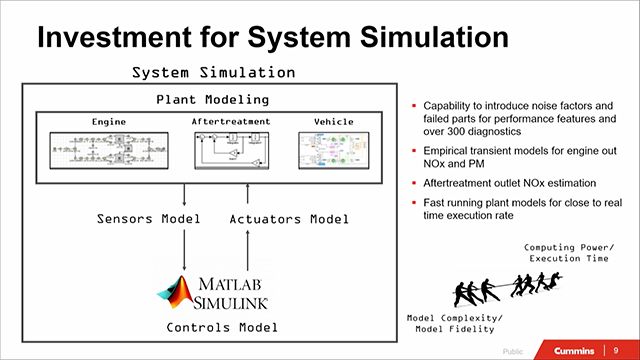
Cummins Inc. is the world’s largest independent diesel engine manufacturer, celebrating their 100th year of operation in 2019. Cummins manufactures and supplies engines ranging in displacement from 2.8L to 95L using a variety of fuels to a diverse customer and applications base across the globe. The combination of tightening global emissions standards, increased customer expectations with regards to reliability, and demands for improved fuel economy from production line to Emissions-Useful-Life (EUL) presents a complicated set of technical challenges across all their product lines.
To help meet these technical challenges, Cummins is utilizing MathWorks tools to perform simulations both in a hardware-in-loop (HIL) environment as well as using a fully virtual model-in-loop (MIL)/software-in-loop (SIL) environment with engine and aftertreatment plant models. Using these models, Cummins can perform both sub-system and system-level performance characterization and robustness testing, which is typically expensive, difficult, or impossible to accomplish in the real world. This simulation data is used to provide guidance to programs on controller tuning and to inform decisions on system performance and diagnostic robustness.
System simulation (engine, aftertreatment, and controls) use cases for performance and diagnostic validation using MathWorks tools are demonstrated in this presentation. Evaluation of model fidelity, identification of customer clusters, noise factor robustness testing, system simulation, and evaluation of performance and diagnostic capability use a number of tools to deliver efficient virtual product validation. Using examples from a recent program, Cummins shares how MathWorks tools are being applied in support of continuous product improvement efforts.
Simulink for Adaptive AUTOSAR
Mark Danielsen, MathWorks
Adaptive AUTOSAR is a modern software framework intended for high-performance, on-board computers often used in autonomous systems. Based on POSIX and C++, it supports dynamic and updatable software and services-oriented communication, and has extensions for safety and security. In this talk, MathWorks introduces you to Adaptive AUTOSAR concepts and showcases how the Simulink® family of products offers direct support for Adaptive AUTOSAR, including:
Modeling and simulation of Adaptive software components using service-oriented communication
Support for AUTOSAR Adaptive schema 18-10
C++ production code generation with Adaptive middleware interfaces (ara::com), and AUTOSAR XML export
On the Road to Autonomous Systems and Autonomous Driving
Kamran Turkoglu, NIO Inc.
Achieving human-level driving through automated mechanical/dynamic systems has been a 10+ year-long mission/problem which has welcomed several approaches from pure statistical learning-based strategies to many applications from control theory, real-time optimization, and stochastic systems. With this in mind, we would like to share NIO’s story on how we approach autonomous driving, and our adventure on the road to achieving L4 autonomous driving capabilities.
Planning Model Architecture and Modeling Patterns for ISO 26262 Compliance
Jason Moore, MathWorks
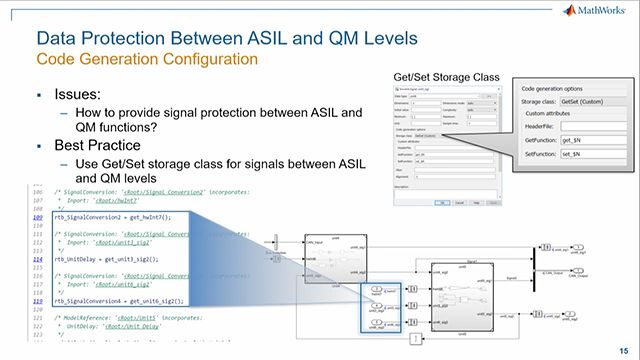
The ISO 26262 standard for functional safety provides guidance on the development of automotive electronics and electrical system, including embedded software. A common challenge is to determine the strategy, software architecture, and design patterns up front in a project to achieve standard compliance and to avoid mid-project changes to these foundational areas. In this presentation, MathWorks engineers will address the following topics based on their experiences applying Simulink® to production programs that require ISO 26262 compliance.
Key considerations for model architecture for ISO 26262 compliance
Modeling constructs required to meet freedom from interference
Applying the above best practices to meet AUTOSAR at the same time
Keeping System Documentation Current With the Increasing Pace of Agile Product Development
Bharath Sundar, Delphi Technologies Jim Allen, Delphi Technologies
The fast pace of the Agile methodology requires OEMs and Tier 1 suppliers to work hand in hand to develop and refine requirements and make quicker interim deliveries. Advances in Simulink® and Polarion® ALM have facilitated requirements linking to models assisting systems engineers in developing and documenting requirements for the new control strategies. Advances in MATLAB® and Simulink Report Generator™ enabled the auto-generation of documentation from the models assisting systems engineers to create current and correct documentation for the customers. A concept will be proposed to merge linked requirements in Polarion ALM with the auto-generated documents from Simulink models. Known APIs that can enable this merge will be summarized. This proposed concept will provide an all-encompassing auto-generated document that will save time in providing up-to-date documentation for controls and diagnostic strategies.
What’s New in MATLAB and Simulink for ADAS and Automated Driving
Mark Corless, MathWorks
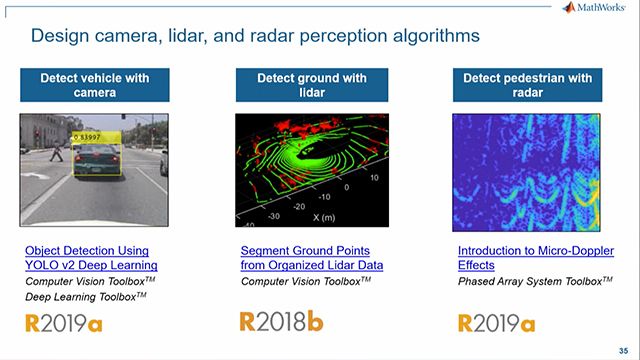
ADAS and autonomous driving systems are redefining the automotive industry and changing all aspects of transportation, from daily commutes to long-haul trucking. MATLAB® and Simulink® provide the ability to develop the perception, planning, and control components used in these systems.
In this talk you will learn about these tools through examples that ship in R2019a, including:
Perception: Design LIDAR, vision, radar, and sensor fusion algorithms with recorded and live data
Planning: Visualize street maps, design path planners, generate C/C++ code
Controls: Design model-predictive controller for traffic jam assist, test with synthetic scenes and sensors, generate C/C++ code
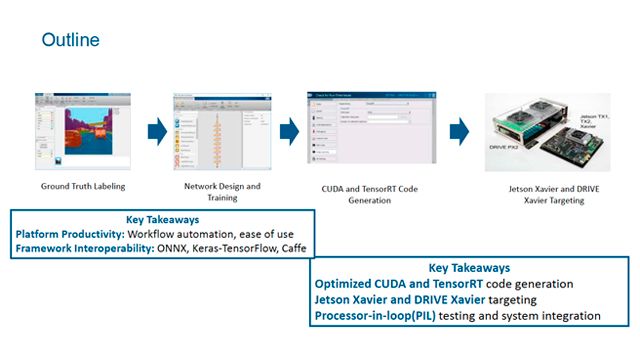
Deep Learning: Label data, train networks, generate GPU code
Systems: Simulate perception and control algorithms, integrate and test hand code
Evaluating Path Planner and Vehicle Controller for Automated Parking
Shusen Zhang, MathWorks
Learn how to design a path planner and vehicle control algorithm for an automatic valet parking feature. The presenter will demonstrate regression testing to evaluate the functionality of the path planner and vehicle controller in simulation by varying actors in the scene.
Tackling Fleet Test Data with MATLAB
Will Wilson, MathWorks
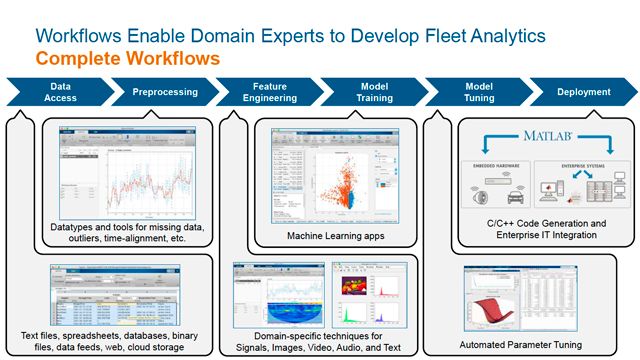
Can your data analytics technology keep up with the rising data intake from a connected test fleet? Are you able to find interesting events in stored data, and zoom in and out with ease? In this talk, Will Wilson will demonstrate how to implement engineering applications quickly and efficiently with MATLAB® to:
Automatically detect events of interest and zoom in for signal-level insight
Verify analytics on both the desktop and cluster
Deploy the analytics to keep up with the continuous intake of test data
Reinforcement Learning: Leveraging Deep Learning for Controls
Aditya Baru, MathWorks
Reinforcement learning allows you to solve control problems using deep learning but without using labeled data. Instead, it uses a model of your system that captures the appropriate dynamics of the environment, and learns through performing multiple simulations. This simulation data is used to train a policy represented by a deep neural network that would then replace your traditional controller or decision-making system.
In this session, you will learn how to do reinforcement learning using MathWorks products as well as how to set up your environment models, define the policy and its various hyperparameters, and scale training through parallel computing to improve performance.
Applying Artificial Intelligence to Product Development
Arvind Jayaraman, MathWorks
Artificial intelligence has produced better-than-human accuracy and saved time through automation in many industries. This talk will discuss how deep learning and machine learning can be applied to image, signal, and text data for applications such as extracting critical events, implementing automated driving, and controlling machines. In addition, you’ll see how MATLAB® uses built-in algorithms and apps to save time in key parts of the AI workflow, from data handling to labeling to code generation.
Full Vehicle Simulation for Electrified Powertrain Selection
Mike Sasena, MathWorks Kevin Oshiro, MathWorks
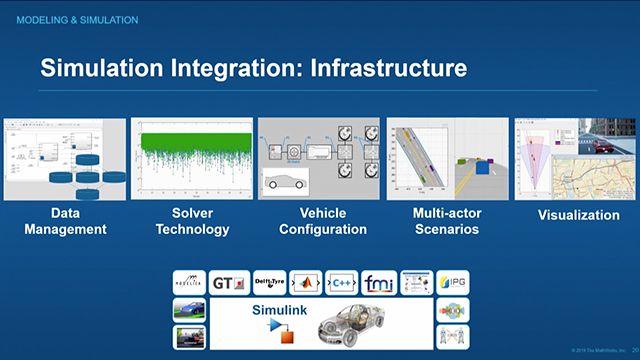
Full vehicle simulation models are needed to assess attributes such as fuel economy and performance for each candidate. At times, this requires integrating models from different engineering teams into a single system level simulation. Integrating these subsystems, including many controllers in model or code together in a closed-loop testing environment, can be challenging. In this session, you will learn how MathWorks automotive modeling tools and simulation integration platform can be used for powertrain selection studies.
Virtual Design of Electrified Powertrain Systems
Javier Gazzarri, MathWorks Dakai Hu, MathWorks
Electrified powertrain engineers design the battery pack, power electronics, and electric machine to meet requirements cascaded from vehicle system level simulations. The motor is energized by a battery that is far from being an ideal voltage source. For example, power delivery from the battery varies as a function of battery State of Charge (SOC), State of Health (SOH), and temperature. On the motor control side, optimal id/iq combinations need to be calibrated, considering fluctuations of the voltage source. In this talk, MathWorks engineers will show how to design a system that is robust to battery power delivery fluctuations.
Objective Drivability Calibration
Jason Rodgers, MathWorks
The effect of the ECU on drivability can be dramatic, and requires time for proper calibration. Traditionally, experienced drivers test a vehicle during tip-in/tip-out maneuvers and provide a subjective drivability rating, iterating on ECU calibrations until the subjective feel is acceptable. Using simulation-based methods, it is possible to conduct much of this analysis up front using objective methods. By extracting key features from the acceleration results, an objective metric can be obtained. Formal optimization methods can identify a calibration set that provides a much better drivability response for the initial in-vehicle tests, thus reducing the overall time required. In this session, you will learn how MathWorks tools for data analysis, vehicle modeling, and calibration were applied to perform objective drivability calibration.
Design and Test Decision-Making, Path-Planning, and Control Modules in Traffic Scenarios
Seo-Wook Park, MathWorks
Learn how to design a lane-following and lane-changing algorithm for a driver assist feature in highway driving. The presenter will demonstrate system-level simulation to test the decision-making, path-planning, and control modules in traffic scenarios.
Full Vehicle Simulation for Electrified Powertrain Selection
Eva Pelster, MathWorks
Full vehicle simulation models are needed to assess attributes such as fuel economy and performance for each candidate. At times, this requires integrating models from different engineering teams into a single system level simulation. It can be challenging to integrate these subsystems with multiple controller models or code together in a closed-loop testing environment. In this talk, you will learn how MathWorks automotive modeling tools and simulation integration platform can be used for powertrain selection studies.