vitdec
Convolutionally decode binary data by using Viterbi algorithm
Syntax
Description
decodedout = vitdec(msg,trellis,tbdepth,opmode,dectype)msg input by using the Viterbi algorithm.
All other inputs specify the convolutional coding trellis, traceback depth, operating mode,
and decision type, respectively, and collectively configure the Viterbi algorithm at run
time.
decodedout = vitdec(msg,trellis,tbdepth,'cont',dectype,___,imetric,istate,iinput)opmode for any of the
preceding syntaxes. The decoder starts with its initial state metrics, traceback states, and
traceback inputs specified by imetric, istate, and
iinput, respectively.
Continuous operation mode enables you to save the internal state information of the decoder for use in subsequent calls to this function. Repeated calls to this function can be useful if your data is partitioned into a series of vectors that you process within a loop. For workflows that require repeated calls to the Viterbi decoding algorithm, see Tips.
[
also returns the final state metrics, traceback states, and traceback inputs at the end of
the decoding process when using a continuous operation mode for any of the preceding
syntaxes. Use decodedout,fmetric,fstate,finput] = vitdec(msg,trellis,tbdepth,'cont',___)fmetric, fstate, and
finput as the initial settings of imetric,
istate, and iinput, respectively, in subsequent
calls to this function. For workflows that require repeated calls to the Viterbi decoding
algorithm, see Tips.
Examples
Convolutionally encode a vector of 1s by using the convenc function, and decode it by using the vitdec function.
Define a trellis structure, by using the poly2trellis function. Use the trellis structure to configure the convenc function when encoding a vector of ones.
trellis = poly2trellis([4 3],[4 5 17;7 4 2]); x = ones(100,1); code = convenc(x,trellis);
When decoding the encoded message, configure the Viterbi decoder to use the trellis structure defined previously, a traceback depth of 2, the truncated operating mode, and hard decisions.
tb = 2; decoded = vitdec(code,trellis,tb,'trunc','hard');
Verify that the decoded message is a vector of 100 1s.
isequal(decoded,ones(100,1))
ans = logical
1
Apply Viterbi decoding to a punctured signal. The puncturing changes the code rate from 1/2 to 3/4.
Initialize parameters for the encoding and decoding operations.
trellis = poly2trellis(7,[171 133])
trellis = struct with fields:
numInputSymbols: 2
numOutputSymbols: 4
numStates: 64
nextStates: [64×2 double]
outputs: [64×2 double]
tbdepth = 96; opmode = 'trunc'; dectype = 'hard'; puncpat = [1;1;0;1;1;0];
Calculate the unpunctured and punctured code rates.
K = log2(trellis.numInputSymbols); % Number of input streams N = log2(trellis.numOutputSymbols); % Number of output streams unpunc_coderate = K/N
unpunc_coderate = 0.5000
punc_coderate = (K/N)*(length(puncpat)/sum(puncpat))
punc_coderate = 0.7500
Convolutionally encode an all 1s bit message with puncturing applied to the coded output.
msg = ones(100*length(puncpat),1); puncturedcode = convenc(msg,trellis,puncpat);
Show the lengths of the message, the punctured code, and the puncture pattern.
length(msg)
ans = 600
length(puncturedcode)
ans = 800
length(puncpat)
ans = 6
Apply Viterbi decoding to the punctured coded message. Compare the decoded output to the original message. Even with puncturing applied to the coded message, the Viterbi decoding recovered the message with zero error.
codedin = puncturedcode; decodedout = vitdec(codedin,trellis,tbdepth,opmode,dectype,puncpat);
isequal(msg,decodedout)
ans = logical
1
Estimate the bit error rate (BER) simulation for a link that uses a rate 2/3 convolutional code, applies 16-QAM modulation, and transmits data through an AWGN channel. This diagram shows a rate 2/3 encoder with two input streams, three output streams, and seven shift registers.
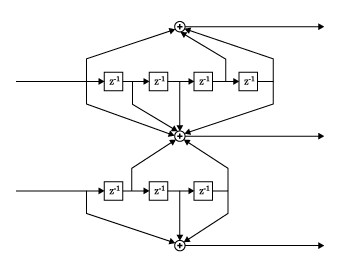
Define the convolutional coding trellis represented by the diagram.
trellis = poly2trellis([5 4],[23 35 0; 0 5 13])
trellis = struct with fields:
numInputSymbols: 4
numOutputSymbols: 8
numStates: 128
nextStates: [128×4 double]
outputs: [128×4 double]
K = log2(trellis.numInputSymbols); % Number of input bit streams N = log2(trellis.numOutputSymbols); % Number of output bit streams coderate = K/N; fprintf('K is %d and N is %d. The code rate is %3.2f.\n', ... K,N,coderate)
K is 2 and N is 3. The code rate is 0.67.
Set the modulation order, and compute the number of bits per modulation symbol. Generate random binary data. The input bit stream must be a multiple of number of the input bit streams (K) for the coding operation and must be a multiple of the number of bits per modulation symbol (bps) for the modulation operation.
M = 16; % Modulation order bps = log2(M); % Bits per modulation symbol numSymPerFrame = 5000; dataIn = randi([0 1],K*bps*numSymPerFrame,1);
Convolutionally encode the input data.
codedout = convenc(dataIn,trellis);
Apply 16-QAM modulation to the encoded symbols.
txSig = qammod(codedout,M,'InputType','bit');
Using the number of bits per symbol (bps) and the code rate (coderate), convert the ratio of energy per bit to noise power spectral density (EbNo) to an signal-to-noise (snr) value for use by the awgn function. Convert a 10 dB Eb/No to an equivalent SNR ratio. Pass the signal through an AWGN channel.
EbNo = 9;
snr = EbNo + 10*log10(bps*coderate);
rxSig = awgn(txSig,snr,'measured');Demodulate the received signal.
demodSig = qamdemod(rxSig,M,'OutputType','bit');
Specify the traceback depth of the Viterbi decoder.
tbdepth = 16;
Decode the binary demodulated signal by using a Viterbi decoder operating in a continuous termination mode.
dataOut = vitdec(demodSig,trellis,tbdepth,'cont','hard');
Calculate the delay through the decoder, and account for the decoding delay when computing the BER. Compare the coded BER with the theoretical uncoded BER to see the improved BER for the coded data.
decDelay = K*tbdepth; berCoded = biterr( ... dataIn(1:end-decDelay),dataOut(decDelay+1:end)) / ... length(dataOut(decDelay+1:end)); berUncoded = berawgn(EbNo,'qam',M); fprintf('The coded BER is %6.5f.\nThe uncoded BER is %6.5f.\n', ... berCoded,berUncoded)
The coded BER is 0.00045. The uncoded BER is 0.00439.
Input Arguments
Output Arguments
More About
Tips
Consider using the
comm.ViterbiDecoderSystem object™ when successive calls to the Viterbi algorithm are needed. The System object simplifies the required state retention operation by inherently retaining state metrics, traceback states, and inputs between calls.
References
[1] Clark, George C., and J. Bibb Cain. Error-Correction Coding for Digital Communications. Applications of Communications Theory. New York: Plenum Press, 1981.
[2] Gitlin, Richard D., Jeremiah F. Hayes, and Stephen B. Weinstein. Data Communications Principles. Applications of Communications Theory. New York: Plenum Press, 1992.
[3] Heller, J., and I. Jacobs. “Viterbi Decoding for Satellite and Space Communication.” IEEE® Transactions on Communication Technology 19, no. 5 (October 1971): 835–48. https://doi.org/10.1109/TCOM.1971.1090711.
[4] Yasuda, Y., K. Kashiki, and Y. Hirata. “High-Rate Punctured Convolutional Codes for Soft Decision Viterbi Decoding.” IEEE Transactions on Communications 32, no. 3 (March 1984): 315–19. https://doi.org/10.1109/TCOM.1984.1096047.
[5] Haccoun, D., and G. Begin. “High-Rate Punctured Convolutional Codes for Viterbi and Sequential Decoding.” IEEE Transactions on Communications 37, no. 11 (November 1989): 1113–25. https://doi.org/10.1109/26.46505.
[6] Begin, G., D. Haccoun, and C. Paquin. “Further Results on High-Rate Punctured Convolutional Codes for Viterbi and Sequential Decoding.” IEEE Transactions on Communications 38, no. 11 (November 1990): 1922–28. https://doi.org/10.1109/26.61470.
[7] Moision, B. "A Truncation Depth Rule of Thumb for Convolutional Codes." In Information Theory and Applications Workshop (January 27 2008-February 1 2008, San Diego, California), 555-557. New York: IEEE, 2008.