narnet
(即将删除)非线性自回归神经网络
以后的版本中将会删除 narnet。有关详细信息,请参阅Transition Legacy Neural Network Code to dlnetwork Workflows。
有关更新代码的建议,请参阅版本历史记录。
说明
narnet( 接受以下参量:feedbackDelays,hiddenSizes,feedbackMode,trainFcn)
由从 0 或正值开始递增的反馈延迟组成的行向量,
feedbackDelays由一个或多个隐藏层大小组成的行向量,
hiddenSizes反馈的类型,
feedbackMode训练函数,
trainFcn
并返回一个 NAR 神经网络。
您可以训练 NAR(非线性自回归)神经网络来根据时间序列的过去值预测时间序列。
示例
训练非线性自回归 (NAR) 神经网络,并对新的时间序列数据进行预测。预测时间序列中的序列值也称为多步预测。闭环网络可以执行多步预测。在外部反馈缺失时,闭环网络可以继续通过使用内部反馈来进行预测。在 NAR 预测中,时间序列的将来值仅根据该时间序列的过去值进行预测。
加载简单时间序列预测数据。
T = simplenar_dataset;
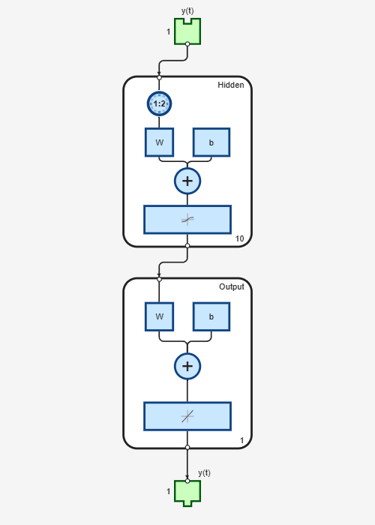
创建一个 NAR 网络。定义隐藏层的反馈延迟和大小。
net = narnet(1:2,10);
使用 preparets 准备时间序列数据。该函数会自动移动输入和目标时间序列,使其与填充初始输入和层延迟状态所需的步数相同。
[Xs,Xi,Ai,Ts] = preparets(net,{},{},T);建议完全以开环方式创建网络,然后将网络转换为闭环网络以进行向前多步预测。之后,该闭环网络可以根据您的需要预测任意数量的将来值。如果您仅在闭环模式下仿真神经网络,则网络可以执行与输入序列中的时间步数量一样多的预测。
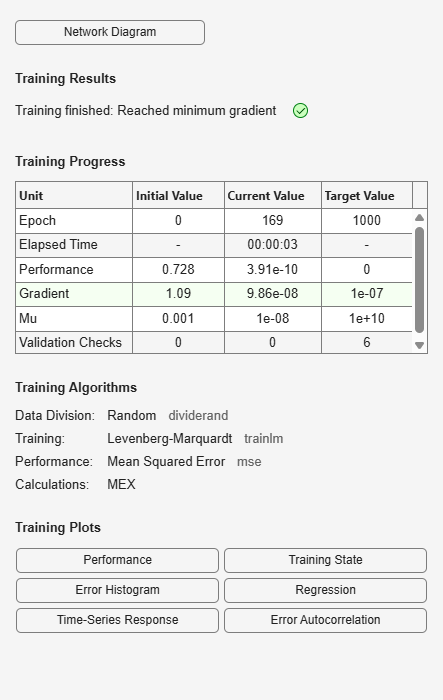
训练 NAR 网络。train 函数以开环(串并行架构)形式训练网络,包括验证和测试步骤。
net = train(net,Xs,Ts,Xi,Ai);
显示经过训练的网络。
view(net)
基于网络输入 Xs、初始输入状态 Xi 和初始层状态 Ai 计算开环网络的网络输出 Y、最终输入状态 Xf 和最终层状态 Af。
[Y,Xf,Af] = net(Xs,Xi,Ai);
计算网络性能。
perf = perform(net,Ts,Y)
perf = 1.0100e-09
要预测接下来 20 个时间步的输出,请先在闭环模式下对网络进行仿真。开环网络 net 的最终输入状态 Xf 和层状态 Af 成为闭环网络 netc 的初始输入状态 Xic 和层状态 Aic。
[netc,Xic,Aic] = closeloop(net,Xf,Af);
显示闭环网络。该网络只有一个输入。在闭环模式下,此输入连接到输出。直接延迟输出连接将替换延迟目标输入。
view(netc)

要对网络进行向前 20 个时间步的仿真,请输入一个长度为 20 的空元胞数组。该网络只需要 Xic 和 Aic 中给出的初始条件。
Yc = netc(cell(0,20),Xic,Aic)
Yc=1×20 cell array
{[0.8346]} {[0.3329]} {[0.9084]} {[1.0000]} {[0.3190]} {[0.7329]} {[0.9801]} {[0.6409]} {[0.5146]} {[0.9746]} {[0.9077]} {[0.2807]} {[0.8651]} {[0.9897]} {[0.4093]} {[0.6838]} {[0.9976]} {[0.7007]} {[0.4311]} {[0.9660]}