export
Export driving scenario to ASAM OpenDRIVE, ASAM OpenSCENARIO XML or RoadRunner HD Map file
Syntax
Description
export(
exports the roads, lanes, junctions, and actors in a driving scenario to the ASAM OpenDRIVE® file format, describing the static content of driving scenario. There may be
variations between the original scenario and the exported scenario. For details, see Limitations.scenario,"OpenDRIVE",filename)
The function supports exporting driving scenarios to OpenDRIVE® file versions V1.4, V1.5, and ASAM OpenDRIVE file version V1.6.
export(
exports the road network, actors, and trajectories in a driving scenario to the ASAM OpenSCENARIO® XML file format, describing the dynamic content of driving scenario. Exporting
to an ASAM OpenSCENARIO XML file also exports several data files. For more information, see Data Files Exported with ASAM OpenSCENARIO XML File. To know about the
default actor parameters that the function exports, see ASAM OpenSCENARIO XML Representations.scenario,"OpenSCENARIO XML",filename)
The function supports exporting driving scenarios to ASAM OpenSCENARIO XML file versions V1.0 and V1.1.
Note
The function interpolates additional waypoints between the ones specified in the driving scenario, to generate smooth trajectories for exported actors in the output ASAM OpenSCENARIO XML file.
The function does not support exporting reverse waypoints of actors to an ASAM OpenSCENARIO XML file.
export(___, specifies
options using one or more name-value arguments and any of the input argument combinations
from previous syntaxes. For example,
Name=Value)export(scenario,"OpenDRIVE",filename,OpenDRIVEVersion=1.5) exports the
driving scenario to V1.5 of the OpenDRIVE file format.
export(
exports the road network and static actors in a driving scenario to the RoadRunner HD Map file format, describing the static content of driving scenario. There
may be variations between the original scenario and the exported scenario. For details, see
Limitations.scenario,"RoadRunner HD Map",filename)
Examples
Create a driving scenario.
inputScenario = drivingScenario;
Import a OpenStreetMap® road network into the driving scenario. For more information about the osm file, see [1].
fileName = "chicago.osm"; roadNetwork(inputScenario,"OpenStreetMap",fileName);
Export to ASAM OpenDRIVE® file.
fileName = "chicago.xodr"; export(inputScenario,"OpenDRIVE",fileName);
Warning: There may be minor variation between the actual driving scenario and the exported OpenDRIVE road networks. For more information, see <a href="matlab:helpview(fullfile(docroot,'toolbox','driving','helptargets.map'),'exportOpenDriveCLI')">export</a>.
Read the exported ASAM OpenDRIVE file by using the roadNetwork function.
scenario = drivingScenario;
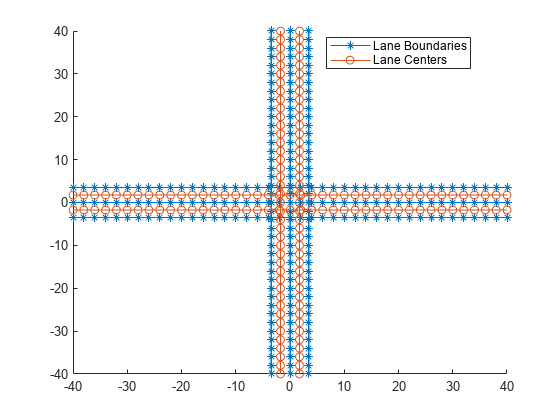
roadNetwork(scenario,"OpenDRIVE",fileName);Plot the exported scenario. Notice that the display for the exported road network is flipped along the x and y dimensions and does not have the border lines.
figure
plot(inputScenario)
zoom(2);
title("Actual Scenario")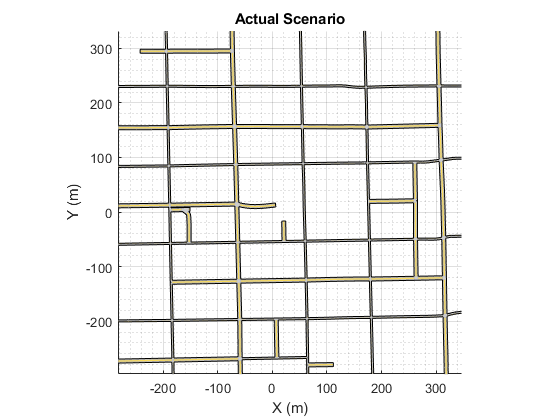
figure
plot(scenario)
zoom(2);
title("Exported Scenario")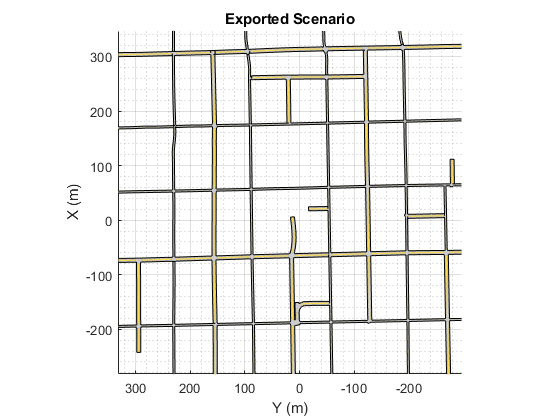
Appendix
[1] The osm file is downloaded from https://www.openstreetmap.org, which provides access to crowd-sourced map data all over the world. The data is licensed under the Open Data Commons Open Database License (ODbL), https://opendatacommons.org/licenses/odbl/.
Create the driving scenario with one road having an S-curve.
scenario = drivingScenario; roadcenters = [-35 20 0; -20 -20 0; 0 0 0; 20 20 0; 35 -20 0];
Create the lanes and add them to the road.
lm = [laneMarking("Solid",Color="w") ... laneMarking("Dashed",Color="y") ... laneMarking("Dashed",Color="y") ... laneMarking("Solid",Color="w")]; ls = lanespec(3,Marking=lm); road(scenario,roadcenters,"Lanes",ls);
Plot the scenario.
plot(scenario)

Export the road network in the scenario to ASAM OpenDRIVE® file.
fileName = "scurveroad.xodr"; export(scenario,"OpenDRIVE",fileName,OpenDRIVEVersion=1.6)
Warning: There may be minor variation between the actual driving scenario and the exported OpenDRIVE road networks. For more information, see <a href="matlab:helpview(fullfile(docroot,'toolbox','driving','helptargets.map'),'exportOpenDriveCLI')">export</a>.
You can import the ASAM OpenDRIVE file to MATLAB® workspace by using the roadNetwork function.
scenario = drivingScenario;
roadNetwork(scenario,"OpenDRIVE",fileName)
plot(scenario)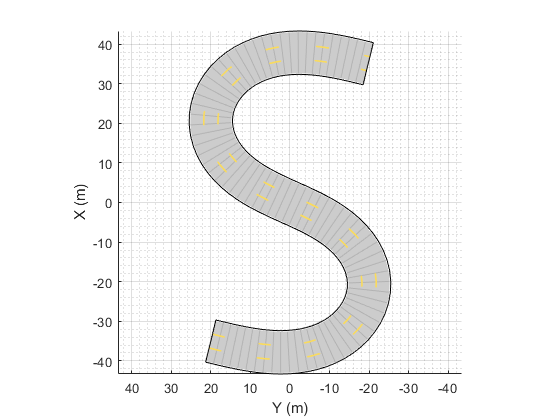
Copyright 2020-21 The MathWorks, Inc.
Create a driving scenario.
scenario = drivingScenario(StopTime=6);
Import the road network from an ASAM OpenDRIVE® file into the scenario.
fileName = "parking.xodr"; roadNetwork(scenario,"OpenDRIVE",fileName);
Add an ego vehicle to the scenario. Set a trajectory in which the vehicle drives along the curve at varying speed.
egoVehicle = vehicle(scenario,ClassID=1); waypoints = [-80 43; -34 29; -18 15; -10 -2; 4 -17; 38 -24; 52 -20]; speed = [50 20 20 20 20 50 50]; trajectory(egoVehicle,waypoints,speed);
Add a non-ego actor and set it to spawn during the simulation by specifying an entry time value. Generate a trajectory for the non-ego actor.
truck = vehicle(scenario,ClassID=2,Position=[4 -17 0],EntryTime=3); waypoints = [4 -17; 20 -24; 38 -24; 60 -16]; speed = [40 40 40 40]; trajectory(truck,waypoints,speed);
Plot the scenario and run the simulation. Observe how the vehicle slows down as it drives along the curve.
plot(scenario,Waypoints="on"); while advance(scenario) pause(0.01) end
Export the scenario to an ASAM OpenSCENARIO® XML file.
export(scenario,"OpenSCENARIO XML","parking.xosc");

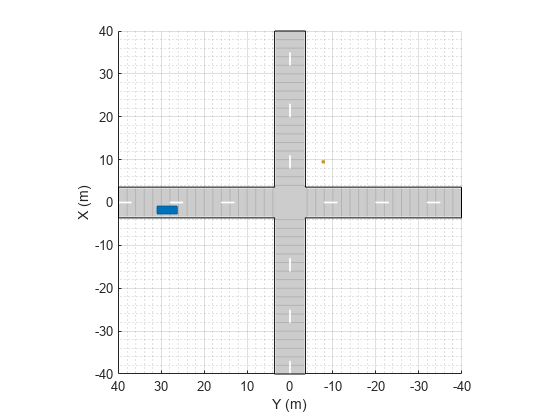
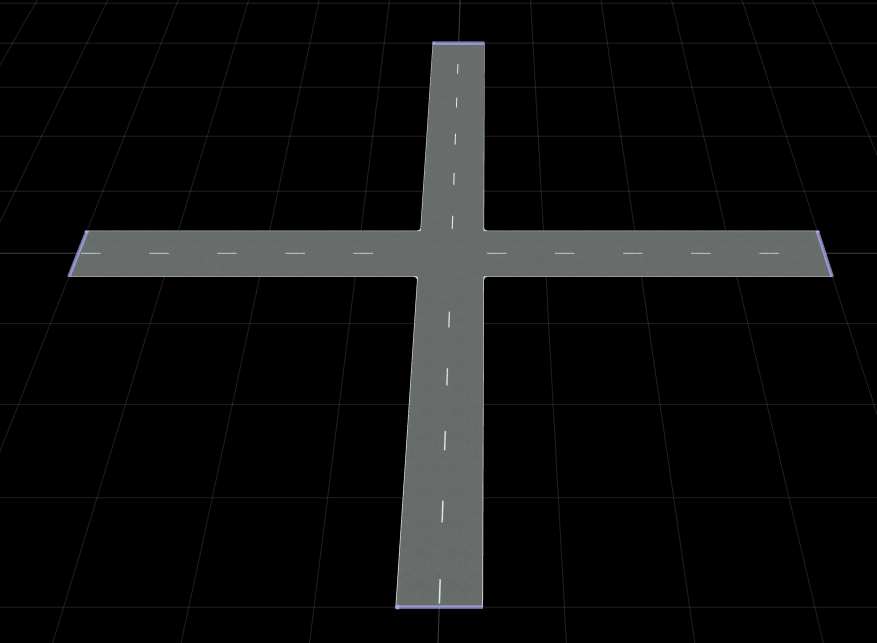
This example shows how to create a RoadRunner HD Map from a driving scenario. It also shows how to build the HD Map as a scene in RoadRunner. This step requires a RoadRunner Scene Builder license.
Create a driving scenario object.
scenario = helperCreateDrivingScenario;
Plot the scenario.
plot(scenario)
Export the driving scenario directly to a .rrhd binary file.
export(scenario,"RoadRunner HD Map","directExportScenario.rrhd")
Alternatively, you can first get the RoadRunner HD Map object for the scenario and plot it.
rrMap = getRoadRunnerHDMap(scenario); plot(rrMap)
You can inspect it and make any desired modifications. Then, write the RoadRunner HD Map to a .rrhd binary file.
write(rrMap,'4wayIntersection.rrhd')Import the map into RoadRunner. Specify the import options to enable overlap groups.
rrApp = roadrunner("D:\RR\TestProjects"); impOpts = roadrunnerHDMapImportOptions(BuildOptions=roadrunnerHDMapBuildOptions(EnableOverlapGroupsOptions=enableOverlapGroupsOptions(IsEnabled=false))); importScene(rrApp,fullfile(pwd,"4wayIntersection.rrhd"),"RoadRunner HD Map",impOpts)
Helper Functions
helperCreateDrivingScenario creates a four way intersection driving scenario with an ego vehicle and a pedestrian.
function scenario = helperCreateDrivingScenario % Create scenario and add roads scenario = drivingScenario; roadCenters = [0 40 0; 0 -40 0]; marking = [laneMarking('Solid') laneMarking('Dashed') laneMarking('Solid')]; laneSpecification = lanespec(2, 'Width', 3.5, 'Marking', marking); road(scenario, roadCenters, 'Lanes', laneSpecification, 'Name', 'Road'); roadCenters = [-40 0 0; 40 0 0]; marking = [laneMarking('Solid') laneMarking('Dashed') laneMarking('Solid')]; laneSpecification = lanespec(2, 'Width', 3.5, 'Marking', marking); road(scenario, roadCenters, 'Lanes', laneSpecification, 'Name', 'Road1'); % Add ego vehicle egoVehicle = vehicle(scenario, ... 'ClassID', 1, ... 'Position', [-1.75 30 0], ... 'FrontOverhang', 0.9, ... 'Wheelbase', 2.8, ... 'Mesh', driving.scenario.carMesh, ... 'Name', 'Vehicle Under Test'); waypoints = [-1.75 30 0; -1.75 10.629767723813 0; -0.980075893866154 4.2738387109925 0; 4.2738387109925 -0.980075893866154 0; 10.629767723813 -1.75 0; 30 -1.75 0]; speed = 2.77777777777778; yaw = [-90;-90;-69.38;-20.62;0;0]; smoothTrajectory(egoVehicle, waypoints, speed, 'Yaw', yaw); % Add the non-ego actors euroncappedestriantarget = actor(scenario, ... 'ClassID', 4, ... 'Length', 0.6, ... 'Width', 0.5, ... 'Height', 1.8, ... 'Position', [9.5 -7.75 0], ... 'PlotColor', [237 177 32] / 255, ... 'Name', 'Euro NCAP Pedestrian Target'); waypoints = [9.5 -7.75 0; 9.5 -6.75 0; 9.5 10 0]; speed = [0;1.38888888888889;1.38888888888889]; waittime = [7.82;0;0]; trajectory(euroncappedestriantarget, waypoints, speed, waittime); end
Input Arguments
Name-Value Arguments
Limitations
ASAM OpenDRIVE Export Limitations
Roads
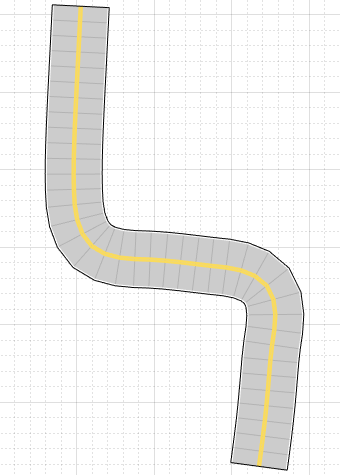
The cubic polynomial and the parametric cubic polynomial geometry types in the scenario are exported as spiral geometry types. This causes some variations in the exported road geometry if the road is a curved road. For example, in the figure below, notice that the sharp corners in the input road became relatively smooth when exported to the ASAM OpenDRIVE format.
Input Road Exported ASAM OpenDRIVE Road 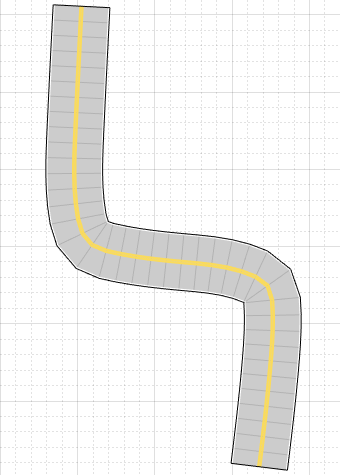
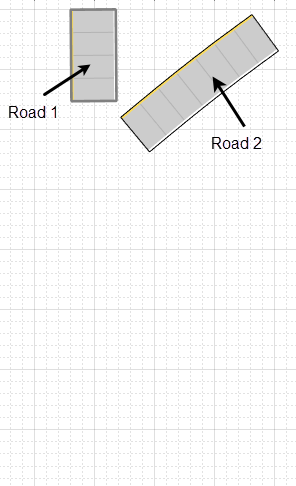
When segments of adjacent roads overlap with each other, the function does not export the overlapping segments of the roads.
Input Roads Exported ASAM OpenDRIVE Roads 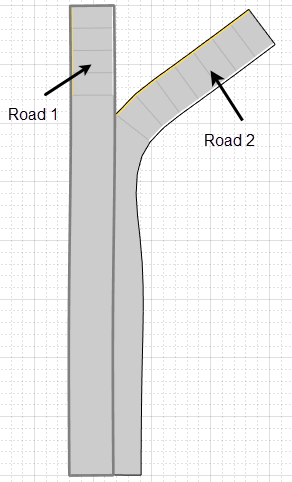
Lanes
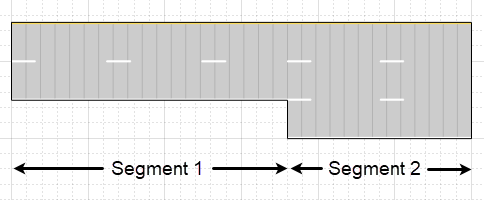
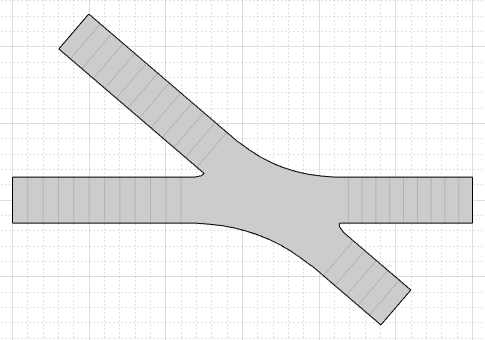
When a road with multiple lane specifications contains a taper between two road segments, the function exports the road without taper.
Input Road Exported ASAM OpenDRIVE Road 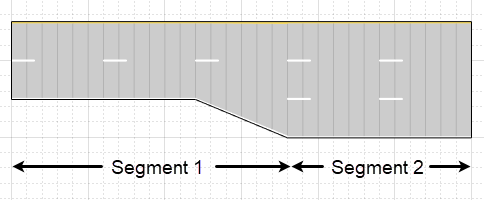
When a road consisting of multiple segments is connected to a junction, the function does not export the road.
Junctions
The junctions of the road network are processed without lane connection information, so the junction shapes may not be accurate in the exported scenario.
Input Road Exported ASAM OpenDRIVE Road 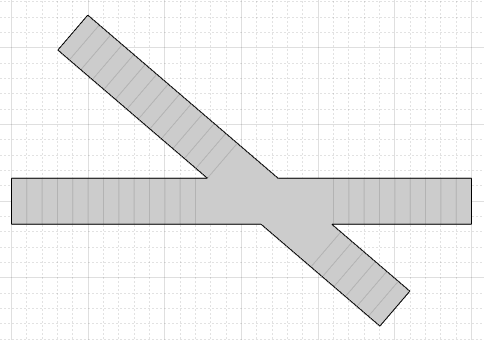
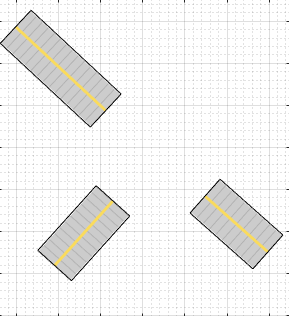
When a junction is not connected to any road, the function does not export such junction.
Input Roads Exported ASAM OpenDRIVE Roads 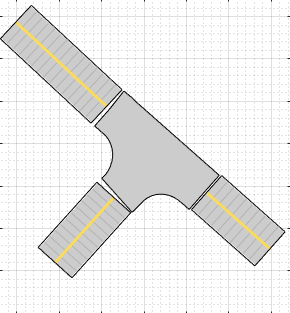
To export a detached junction to an ASAM OpenDRIVE file, you can manually drag incoming or outgoing roads and attach them to the junction.
Actors
The
exportfunction does not export any actor that is present either on a junction or on a road with multiple road segments.While exporting a user-defined actor, the function sets the type of object to
'none'.
ASAM OpenDRIVE Import
When you export a driving scenario object that contains an imported ASAM OpenDRIVE scenario, the limitations of ASAM OpenDRIVE import apply to ASAM OpenDRIVE export. You can import an ASAM OpenDRIVE scenario to a
drivingScenarioobject by using theroadNetworkfunction. For information on the limitations of ASAM OpenDRIVE import, seeroadNetwork.
RoadRunner HD Map Export Limitations
A RoadRunner Scene Builder license is required to build a scene from the HD map file. Without a RoadRunner Scene Builder license, you can import the HD map file and only view the map as nodes and links in RoadRunner.
Composite Lane Specifications
Roads that use composite lane specifications (
compositeLaneSpec) and form loops or intersect with themselves are not supported.Composite lane specifications for creating roads with varying widths are not supported
Lane Markings and Lane Type
For lane markings created using the
laneMarkingobject and lane types created using thelaneTypeobject, onlyColorname-value argument is supported. Only white and yellow colors are supported.For roads that form loops, multiple lane marking styles are not supported.
Parking Lot
Driving scenarios containing parking lots added using the
parkingLotfunction are not supported.
Barriers
Barriers with gaps between segments created using the
barrierfunction withSegmentGapname-value argument, are not supported. Such barriers will be laid out without any gaps in the RoadRunner HD map representation.For barriers, setting the
SegmentLength,Width, andHeightproperties are not supported. These properties are calculated automatically based on the asset size during import to RoadRunner.
Static Actors
Static actors such as pedestrians and bicycles are not supported. To represent these actors in RoadRunner, you can either download a cuboid FBX and place it under Assets/Vehicles/ or edit the map to point to their own assets.
Road Groups and Road Networks
Road junctions and intersections added using the
roadGroupfunction are not supported.Road networks created using the
roadNetworkfunction are not supported when they use road groups.