projectedCuboidTo3D
Syntax
Description
cuboid = projectedCuboidTo3D(projectedCuboid,worldHeight,monoCam)projectedCuboid,
the height data of the objects contained in the projected cuboids
worldHeight, and the camera parameters for the sensor that collected
the images monoCam.
Examples
Input Arguments
Output Arguments
3-D cuboids, returned as an M-by-9 matrix. M
is the number of 3-D cuboids. Each row of the matrix defines the position, size, and
orientation of a 3-D cuboid in the form [xctr
yctr
zctr
xlen
ylen
zlen
xrot
yrot
zrot]. The function assumes 0 degrees of roll and
pitch, and only returns the yaw angle.
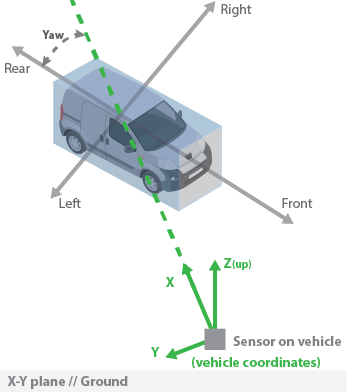
Position — The center of the cuboid, in the vehicle coordinate system, is represented by xctr, yctr, zctr
Size — The length of the cuboid in the x-, y- and z- directions is represented by xlen, ylen, and zlen, respectively.
Orientation — The pitch, roll, and yaw angles, in degrees, are represented by xrot, yrot, zrot, respectively.
This diagram shows how the function determines the yaw angle
(zrot) based on the angle between the face of the sensor that
detected the cuboid and the selected front face of the cuboid. In this case, the value
of face is "front".
Version History
Introduced in R2022b