yolov3ObjectDetectorMonoCamera
Detect objects in monocular camera using YOLO v3 deep learning detector
Since R2023a
Description
The yolov3ObjectDetectorMonoCamera object contains information about a you only look
once version 3 (YOLO v3) object detector that is configured for use with a monocular camera
sensor. To detect objects in an image captured by the camera, pass the detector to the
detect object
function.
When you use the detect object function with a
yolov3ObjectDetectorMonoCamera object, use of a CUDA®-enabled NVIDIA® GPU is highly recommended. The GPU reduces computation time significantly. Usage
of the GPU requires Parallel Computing Toolbox™. For information about the supported compute capabilities, see GPU Computing Requirements (Parallel Computing Toolbox).
Creation
Create a
yolov3ObjectDetectorobject by using YOLO v3 deep learning networks trained on a COCO data set (requires Deep Learning Toolbox™ and Computer Vision Toolbox™ Model for YOLO v3 Object Detection).detector = yolov3ObjectDetector("darknet53-coco");Alternatively, you can create a
yolov3ObjectDetectorobject by using a custom pretrained YOLO v3 network. For more information, seeyolov3ObjectDetector.Create a
monoCameraobject to model the monocular camera sensor.sensor = monoCamera(____);
Create a
yolov3ObjectDetectorMonoCameraobject by passing the detector and sensor as inputs to theconfigureDetectorMonoCamerafunction. The configured detector inherits property values from the original detector.configuredDetector = configureDetectorMonoCamera(detector,sensor,____);
Properties
Object Functions
detect | Detect objects using YOLO v3 object detector configured for monocular camera |
Examples
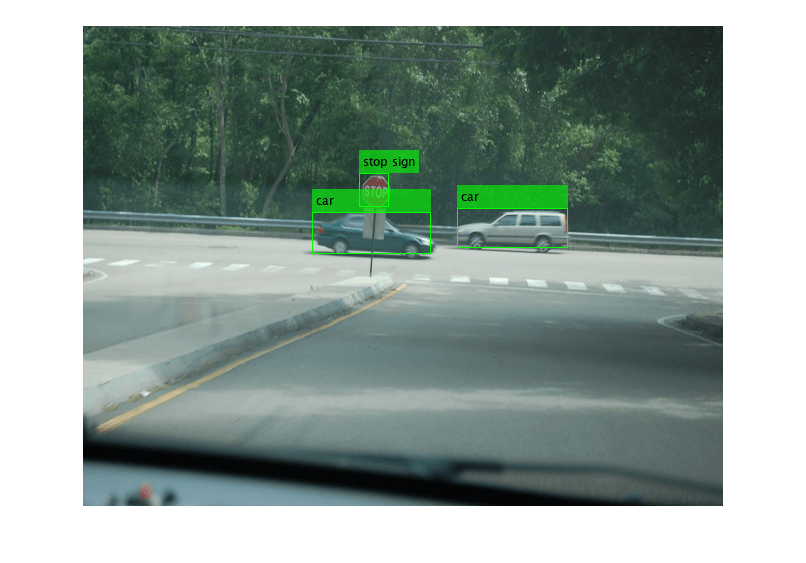
Configure a YOLO v3 object detector for use with a monocular camera mounted on an ego vehicle. Use this detector to detect vehicles and stop signs within an image captured by the camera.
Load a yolov3ObjectDetector object pretrained on the COCO data set.
detector = yolov3ObjectDetector;
Model a monocular camera sensor by creating a monoCamera object. This object contains the camera intrinsics and the location of the camera on the ego vehicle.
focalLength = [309.4362 344.2161]; % [fx fy] principalPoint = [318.9034 257.5352]; % [cx cy] imageSize = [480 640]; % [mrows ncols] height = 2.1798; % height of camera above ground, in meters pitch = 14; % pitch of camera, in degrees intrinsics = cameraIntrinsics(focalLength,principalPoint,imageSize); sensor = monoCamera(intrinsics,height,Pitch=pitch);
Configure the detector for use with the camera. Limit the width of detected objects to 1.5–2.5 meters. The configured detector is a yolov3ObjectDetectorMonoCamera object.
vehicleWidth = [1.5 2.5]; detectorMonoCam = configureDetectorMonoCamera(detector,sensor,vehicleWidth);
Read an image captured by the camera.
I = imread("object-detection-test.png");Detect the vehicles and stop signs in the image by using the detector. Annotate the image with the bounding boxes for the detections and the class labels.
[bboxes,scores,labels] = detect(detectorMonoCam,I); I = insertObjectAnnotation(I,"rectangle",bboxes,labels,AnnotationColor="green"); imshow(I)
Version History
Introduced in R2023a