Euro NCAP Driving Scenarios in Driving Scenario Designer
The Driving Scenario Designer app provides a library of prebuilt scenarios representing European New Car Assessment Programme (Euro NCAP®) test protocols. The app includes scenarios for testing autonomous emergency braking (AEB), emergency lane keeping (ELK), and lane keep assist (LKA) systems.
Choose a Euro NCAP Scenario
To get started, open the Driving Scenario Designer app. At the MATLAB® command prompt, enter drivingScenarioDesigner.
In the app, the Euro NCAP scenarios are stored as MAT-files and organized into folders. To open a
Euro NCAP file, on the app toolstrip, select Open > Prebuilt Scenario. The PrebuiltScenarios folder opens, which includes
subfolders for all prebuilt scenarios available in the app (see also Prebuilt Driving Scenarios in Driving Scenario Designer).
Double-click the EuroNCAP folder, and then choose a Euro NCAP scenario from one of these subfolders.
Autonomous Emergency Braking
These scenarios are designed to test autonomous emergency braking (AEB) systems. AEB systems warn drivers of impending collisions and automatically apply brakes to prevent collisions or reduce the impact of collisions. Some AEB systems prepare the vehicle and restraint systems for impact. The table describes a subset of the AEB scenarios.
| File Name | Description |
|---|---|
AEB_Bicyclist_Longitudinal_25width.mat | The ego vehicle collides with the bicyclist that is in front of it. Before the collision, the bicyclist and ego vehicle are traveling in the same direction along the longitudinal axis. At collision time, the bicycle is 25% of the way across the width of the ego vehicle.
Additional scenarios vary the location of the bicycle at collision time. |
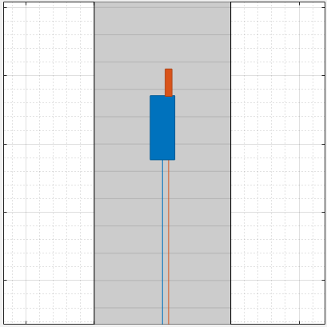
AEB_CCRb_2_initialGap_12m.mat | A car-to-car rear braking (CCRb) scenario, where the ego vehicle rear-ends a braking vehicle. The braking vehicle begins to decelerate at 2 m/s2. The initial gap between the ego vehicle and the braking vehicle is 12 m.
Additional scenarios vary the amount of deceleration and the initial gap between the ego vehicle and braking vehicle. |
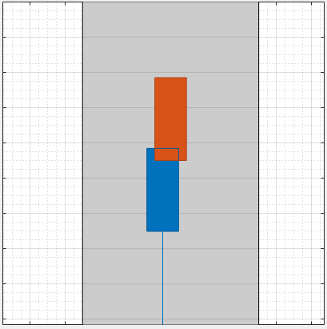
AEB_CCRm_50overlap.mat | A car-to-car rear moving (CCRm) scenario, where the ego vehicle rear-ends a moving vehicle. At collision time, the ego vehicle overlaps with 50% of the width of the moving vehicle.
Additional scenarios vary the amount of overlap and the location of the overlap. |
AEB_CCRs_-75overlap.mat | A car-to-car rear stationary (CCRs) scenario, where the ego vehicle rear-ends a stationary vehicle. At collision time, the ego vehicle overlaps with –75% of the width of the stationary vehicle. When the ego vehicle is to the left of the other vehicle, the percent overlap is negative.
Additional scenarios vary the amount of overlap and the location of the overlap. |
AEB_Pedestrian_Farside_50width.mat | The ego vehicle collides with a pedestrian who is traveling from the left side of the road, which Euro NCAP test protocols refer to as the far side. These protocols assume that vehicles travel on the right side of the road. Therefore, the left side of the road is the side farthest from the ego vehicle. At collision time, the pedestrian is 50% of the way across the width of the ego vehicle.
Additional scenarios vary the location of the pedestrian at collision time. |
AEB_PedestrianChild_Nearside_50width.mat | The ego vehicle collides with a pedestrian who is traveling from the right side of the road, which Euro NCAP test protocols refer to as the near side. These protocols assume that vehicles travel on the right side of the road. Therefore, the right side of the road is the side nearest to the ego vehicle. At collision time, the pedestrian is 50% of the way across the width of the ego vehicle.
|
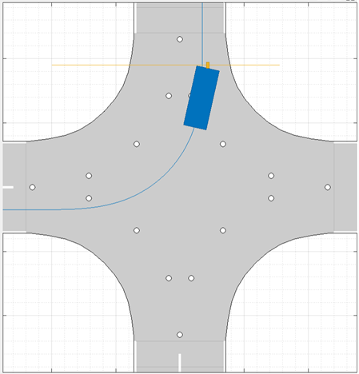
AEB_PedestrianTurning_Farside_50width_10kmh.mat | The ego vehicle turns at an intersection and collides with a pedestrian who is traveling parallel with the left side, or far side, of the vehicle at the start of the simulation. At collision time, the pedestrian is 50% of the way across the width of the ego vehicle. There are three variants of the scenario where the ego vehicle turns at 10, 15 and 20 km/h respectively.
In an additional scenario, the pedestrian is on the other side of the intersection and travels parallel with the right side, or near side, of the vehicle at the start of the simulation. |
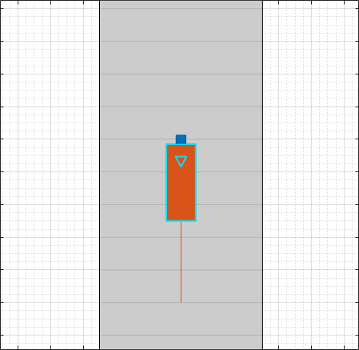
Reverse_AEB_Pedestrian_Stationary_50width.mat | The ego vehicle travels in reverse and collides with a stationary pedestrian. At collision time, the pedestrian is 50% of the way across the width of the ego vehicle.
In an additional scenario, before the collision, the pedestrian travels from the right side, or near side, of the forward frame of reference of the vehicle. |
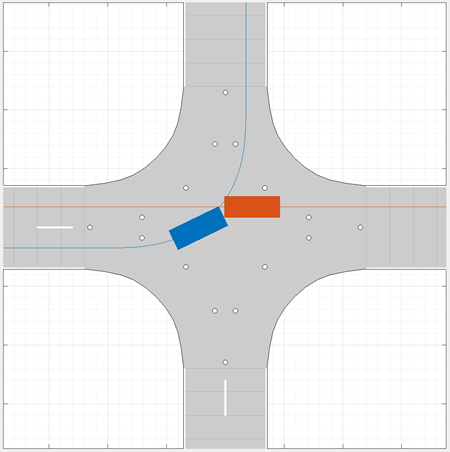
AEB_CCFTap_VUT10kmh_GVT30kmh.mat | A car-to-car-front-turn-across-path (CCFTap) scenario, where the ego vehicle travels at a constant speed of 10 km/h and follows a clothoid curve path through an intersection. The other vehicle travels at a constant speed to the left. The ego vehicle collides with the other vehicle at the center of the ego-vehicle's frontal structure in the intersection.
Additional scenarios vary the speed of the ego vehicle and the other vehicle. In scenarios with the same ego vehicle speed, the location of collision remains constant. Only the time of collision changes depending on the speed of the other vehicle. |



Emergency Lane Keeping
These scenarios are designed to test emergency lane keeping (ELK) systems. ELK systems prevent collisions by warning drivers of impending, unintentional lane departures. The table describes a subset of the ELK scenarios.
| File Name | Description |
|---|---|
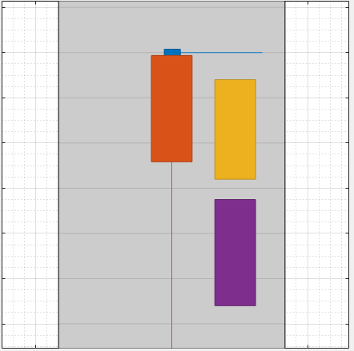
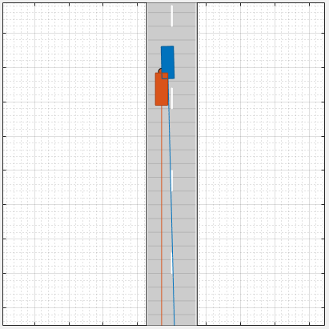
ELK_FasterOvertakingVeh_Intent_Vlat_0.5.mat | The ego vehicle intentionally changes lanes and collides with a faster, overtaking vehicle that is in the other lane. The ego vehicle travels at a lateral velocity of 0.5 m/s.
Additional scenarios vary the lateral velocity and whether the lane change was intentional or unintentional. |
ELK_OncomingVeh_Vlat_0.3.mat | The ego vehicle unintentionally changes lanes and collides with an oncoming vehicle that is in the other lane. The ego vehicle travels at a lateral velocity of 0.3 m/s.
Additional scenarios vary the lateral velocity. |
ELK_OvertakingVeh_Unintent_Vlat_0.3.mat | The ego vehicle unintentionally changes lanes, overtakes a vehicle in the other lane, and collides with that vehicle. The ego vehicle travels at a lateral velocity of 0.3 m/s.
Additional scenarios vary the lateral velocity and whether the lane change was intentional or unintentional. |
ELK_RoadEdge_NoBndry_Vlat_0.2.mat | The ego vehicle unintentionally changes lanes and ends up on the road edge. The road edge has no lane boundary markings. The ego vehicle travels at a lateral velocity of 0.2 m/s.
Additional scenarios vary the lateral velocity and whether the road edge has a solid boundary, dashed boundary, or no boundary. |

Lane Keep Assist
These scenarios are designed to test lane keep assist (LKA) systems. LKA systems detect unintentional lane departures and automatically adjust the steering angle of the vehicle to stay within the lane boundaries. The table lists a subset of the LKA scenarios.
| File Names | Description |
|---|---|
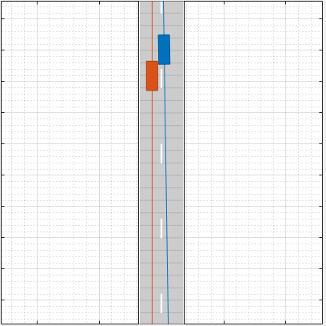
LKA_DashedLine_Solid_Left_Vlat_0.5.mat | The ego vehicle unintentionally departs from a lane that is dashed on the left and solid on the right. The car departs the lane from the left (dashed) side, traveling at a lateral velocity of 0.5 m/s.
Additional scenarios vary the lateral velocity and whether the dashed lane that the vehicle crosses over is on the left or right. |
LKA_DashedLine_Unmarked_Right_Vlat_0.5.mat | The ego vehicle unintentionally departs from a lane that is dashed on the right and unmarked on the left. The car departs the lane from the right (dashed) side, traveling at a lateral velocity of 0.5 m/s.
Additional scenarios vary the lateral velocity and whether the dashed lane marking that the vehicle crosses over is on the left or right. |
LKA_RoadEdge_NoBndry_Vlat_0.5.mat | The ego vehicle unintentionally departs from a lane and ends up on the road edge. The road edge has no lane boundary markings. The car travels at a lateral velocity of 0.5 m/s.
Additional scenarios vary the lateral velocity. |
LKA_RoadEdge_NoMarkings_Vlat_0.5.mat | The ego vehicle unintentionally departs from a lane and ends up on the road edge. The road has no lane markings. The car travels at a lateral velocity of 0.5 m/s.
Additional scenarios vary the lateral velocity. |
LKA_SolidLine_Dashed_Left_Vlat_0.5.mat | The ego vehicle unintentionally departs from a lane that is solid on the left and dashed on the right. The car departs the lane from the left (solid) side, traveling at a lateral velocity of 0.5 m/s.
Additional scenarios vary the lateral velocity and whether the solid lane marking that the vehicle crosses over is on the left or right. |
LKA_SolidLine_Unmarked_Right_Vlat_0.5.mat | The ego vehicle unintentionally departs from a lane that is a solid on the right and unmarked on the left. The car departs the lane from the right (solid) side, traveling at a lateral velocity of 0.5 m/s.
Additional scenarios vary the lateral velocity and whether the solid lane marking that the vehicle crosses over is on the left or right. |



Modify Scenario
By default, in Euro NCAP scenarios, the ego vehicle does not contain sensors. If you are testing a
vehicle sensor, on the app toolstrip, click Add Camera or Add
Radar to add a sensor to the ego vehicle. Then, on the
Sensor tab, adjust the parameters of the sensors to match your sensor
model. If you are testing a camera sensor, to enable the camera to detect lanes, expand the
Detection Parameters section, and set Detection
Type to Lanes & Objects.
You can also adjust the parameters of the roads and actors in the scenario. For example, from the Actors tab on the left, you can change the position or velocity of the ego vehicle or other actors. From the Roads tab, you can change the width of lanes or the type of lane markings.
Generate Synthetic Detections
To generate detections from any added sensors, click Run. As the scenario runs, the Ego-Centric View displays the scenario from the perspective of the ego vehicle. The Bird’s-Eye Plot displays the detections.

Export the detections.
To export sensor data to the MATLAB workspace, on the app toolstrip, select Export > Export Sensor Data. Name the workspace variable and click OK. The app saves the sensor data as a structure containing sensor data such as the actor poses, object detections, and lane detections at each time step.
To export a MATLAB function that generates the scenario and its sensor data, select Export > Export MATLAB Function. This function returns the sensor data as a structure, the scenario as a
drivingScenarioobject, and the sensor models as System objects. By modifying this function, you can create variations of the original scenario. For an example of this process, see Create Driving Scenario Variations Programmatically.
Save Scenario
Because Euro NCAP scenarios are read-only, save a copy of the driving scenario to a new folder. To save the scenario file, on the app toolstrip, select Save > Scenario File As.
You can reopen this scenario file from the app. Alternatively, at the MATLAB command prompt, you can use this syntax.
drivingScenarioDesigner(scenarioFileName)
drivingScenario object. At the MATLAB command prompt, use this syntax, where scenario is the name of
the exported
object.drivingScenarioDesigner(scenario)
sensors is a sensor object or a cell
array of such
objects.drivingScenarioDesigner(scenario,sensors)
drivingScenario object
into your model. This block does not directly read sensor data. To add sensors that you created
in the app to a Simulink model, generate a model containing your scenario and sensors by selecting Export > Export Simulink Model. In the model, the generated Scenario Reader block reads the
scenario and the generated sensor blocks define the sensors.References
[1] European New Car Assessment Programme. Euro NCAP Assessment Protocol - SA. Version 8.0.2. January 2018.
[2] European New Car Assessment Programme. Euro NCAP AEB C2C Test Protocol. Version 2.0.1. January 2018.
[3] European New Car Assessment Programme. Euro NCAP LSS Test Protocol. Version 2.0.1. January 2018.
See Also
Apps
Blocks
- Scenario Reader | Driving Radar Data Generator | Vision Detection Generator | Lidar Point Cloud Generator
Objects
drivingScenario|drivingRadarDataGenerator|visionDetectionGenerator|lidarPointCloudGenerator|insSensor
Related Topics
- Create Driving Scenario Interactively and Generate Synthetic Sensor Data
- Prebuilt Driving Scenarios in Driving Scenario Designer
- Create Driving Scenario Variations Programmatically
- Autonomous Emergency Braking with Sensor Fusion
- Test Open-Loop ADAS Algorithm Using Driving Scenario
- Test Closed-Loop ADAS Algorithm Using Driving Scenario
External Websites
You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
Asia Pacific
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)