dsp.MedianFilter
Median filter
Description
The dsp.MedianFilter
System object™ computes the moving median of the input signal along each channel, independently
over time. The object uses the sliding window method to compute the moving median. In this
method, a window of specified length is moved over each channel, sample by sample, and the
object computes the median of the data in the window. For more details, see Algorithms.
The dsp.MedianFilter object and the movmedian function both compute the moving median of the input signal. However,
the object can process large streams of real-time data and handle system states automatically.
The function performs one-time computations on data that is readily available and cannot
handle system states. For a comparison between the two, see System Objects vs MATLAB Functions.
To compute the moving median of the input:
Create the
dsp.MedianFilterobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Syntax
Description
medFilt = dsp.MedianFiltermedFilt, using the default properties.
medFilt = dsp.MedianFilter(Len)WindowLength property to Len.
medFilt = dsp.MedianFilter(Name,Value) specifies the
WindowLength property using a Name,Value
pair.
Example:
movMin = dsp.MedianFilter('WindowLength',5);Properties
Usage
Syntax
Description
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Filter high-frequency noise from a noisy sine wave signal using a median filter. Compare the performance of the median filter with an averaging filter.
Initialization
Set up a dsp.MedianFilter object, medFilt, and a dsp.MovingAverage object, movavgWin. These objects use the sliding window method with a window length of 7. Create a time scope for viewing the output.
Fs = 1000; medFilt = dsp.MedianFilter(7); movavgWin = dsp.MovingAverage(7); scope = timescope('SampleRate',Fs,... 'TimeSpanSource','Property',... 'TimeSpanOverrunAction','Scroll',... 'TimeSpan',1,'ShowGrid',true,... 'YLimits',[-3 3],... 'LayoutDimensions',[3 1],... 'NumInputPorts',3); scope.ActiveDisplay = 1; scope.Title = 'Signal + Noise'; scope.ActiveDisplay = 2; scope.Title = 'Moving Average Output (Window Length = 7)'; scope.ActiveDisplay = 3; scope.Title = 'Median Filter Output (Window Length = 7)'; FrameLength = 256; count = 1; sine = dsp.SineWave('SampleRate',Fs,'Frequency',10,... 'SamplesPerFrame',FrameLength);
Filter the Noisy Sine Wave
Generate a noisy sine wave signal with a frequency of 10 Hz. Apply the median filter and the moving average object to the signal. View the output on the time scope.
for i = 1:500 hfn = 3 * (rand(FrameLength,1) < 0.02); x = sine() + 1e-2 * randn(FrameLength,1) + hfn; y1 = movavgWin(x); y2 = medFilt(x); scope(x,y1,y2); end
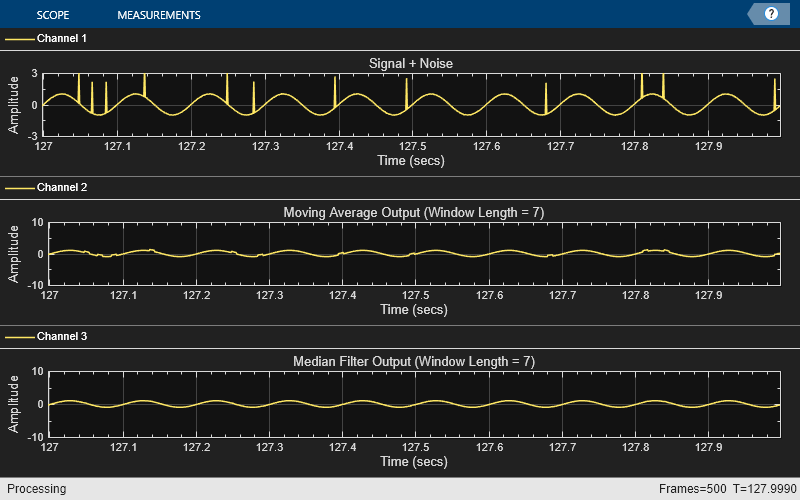
The median filter removes the high-frequency noise more effectively than the moving average object does.
This example shows how to remove the high-frequency outliers from a streaming signal using the dsp.MedianFilter System object?.
Use the dsp.MatFileReader System object to read the gyroscope MAT file. The gyroscope MAT file contains 3 columns of data, with each column containing 7140 samples. The three columns represent the X-axis, Y-axis, and Z-axis data from the gyroscope motion sensor. Choose a frame size of 714 samples so that each column of the data contains 10 frames. The dsp.MedianFilter System object uses a window length of 10. Create a timescope object to view the filtered output.
reader = dsp.MatFileReader('SamplesPerFrame',714,... 'Filename','LSM9DS1gyroData73.mat',... 'VariableName','data'); medFilt = dsp.MedianFilter(10); scope = timescope('NumInputPorts',1,... 'SampleRate',119,... 'YLimits',[-300 300],... 'ChannelNames',{'Input','Filtered Output'},... 'TimeSpanSource','Property',... 'TimeSpan',60,'ShowLegend',true);
Filter the gyroscope data using the dsp.MedianFilter System object. View the filtered Z-axis data in the time scope.
for i = 1:10 gyroData = reader(); filteredData = medFilt(gyroData); scope([gyroData(:,3),filteredData(:,3)]); end
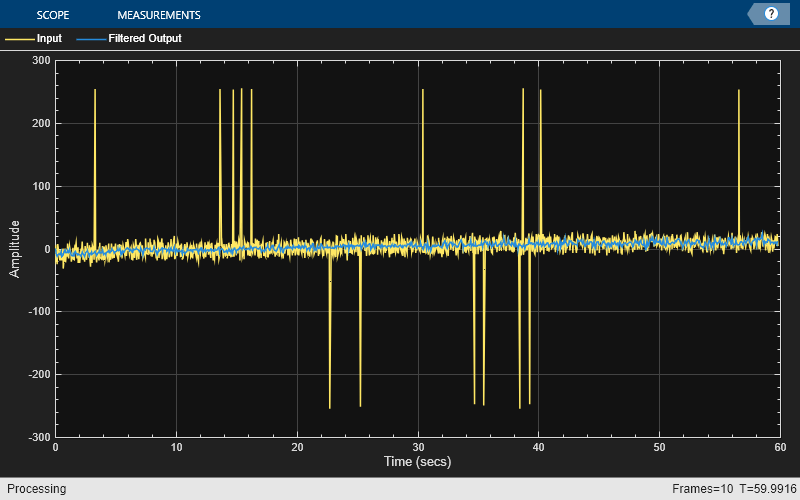
The original data contains several outliers. Zoom in on the data to confirm that the median filter removes all the outliers.
Algorithms
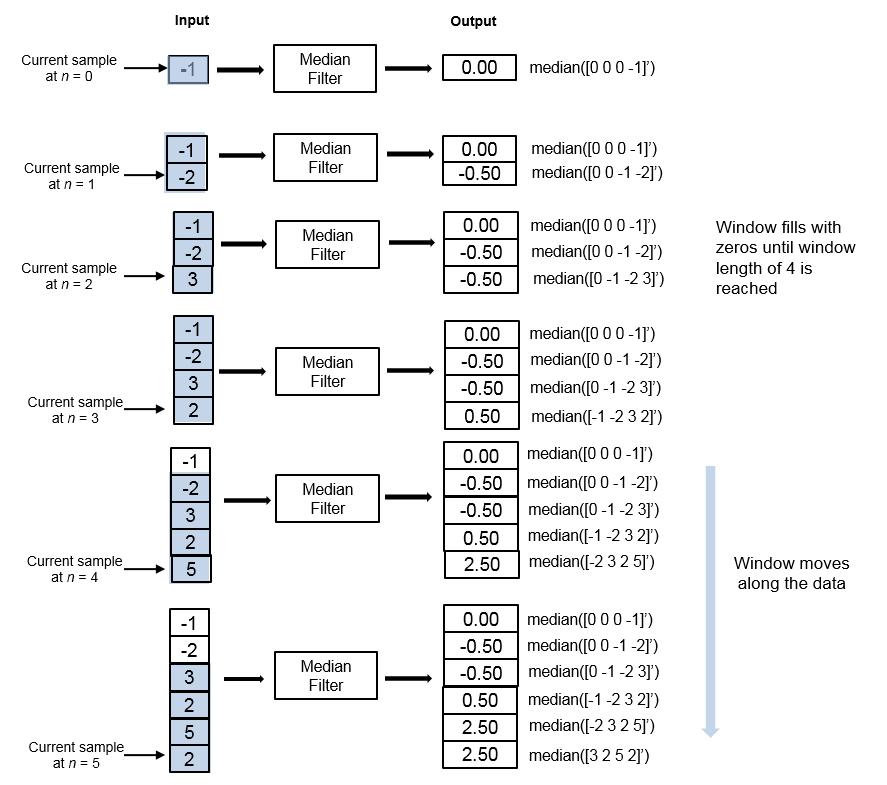
In the sliding window method, the output for each input sample is the median of the current sample and the Len - 1 previous samples. Len is the length of the window in samples. To compute the first Len - 1 outputs, when the window does not have enough data yet, the algorithm fills the window with zeros. As an example, to compute the median value when the second input sample comes in, the algorithm fills the window with Len - 2 zeros. The data vector, x, is then the two data samples followed by Len - 2 zeros. This object performs median filtering on the input data over time.
Consider an example of computing the moving median of a streaming input data using the sliding window method. The algorithm uses a window length of 4. With each input sample that comes in, the window of length 4 moves along the data.
References
[1] Bodenham, Dean. “Adaptive Filtering and Change Detection for Streaming Data.” PH.D. Thesis. Imperial College, London, 2012.
Extended Capabilities
Version History
Introduced in R2016b
See Also
Functions
Objects
dsp.MovingMaximum|dsp.MovingMinimum|dsp.MovingAverage|dsp.MovingRMS|dsp.MovingVariance|dsp.MovingStandardDeviation