Frequency-Domain Adaptive Filter
Compute output, error, and coefficients using frequency domain FIR adaptive filter
Libraries:
DSP System Toolbox /
Filtering /
Adaptive Filters
Description
The Frequency-Domain Adaptive Filter block implements an adaptive finite impulse response (FIR) filter in the frequency domain using the fast block least mean squares (LMS) algorithm. The Filter length and the Block length parameters specify the filter length and the block length values the algorithm uses. When you select the Output filter FFT coefficients check box, the block outputs the discrete Fourier transform of the current filter coefficients. The block offers the constrained and unconstrained versions of the algorithm with partitioned and nonpartitioned modes. For details, see Algorithms.
Ports
Input
Output
Parameters
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|
Algorithms
Frequency-domain adaptive filtering consists of three steps - filtering, error estimation, and
tap-weight adaptation. This algorithm implements FIR filtering in the frequency domain using
the overlap-save or overlap-add method. For more implementation details of these two
methods, see the Algorithms section in the dsp.FrequencyDomainFIRFilter
object page. The error estimation and the tap-weight adaptation are implemented using the
fast block LMS algorithm (FBLMS).
The frequency-domain adaptive filter processes input data and the desired signal data as a block of samples using the fast block LMS (FBLMS) algorithm. Here is the block diagram of the frequency-domain adaptive filter using the FBLMS algorithm. The frequency-domain FIR filter in this diagram uses the overlap-save method.
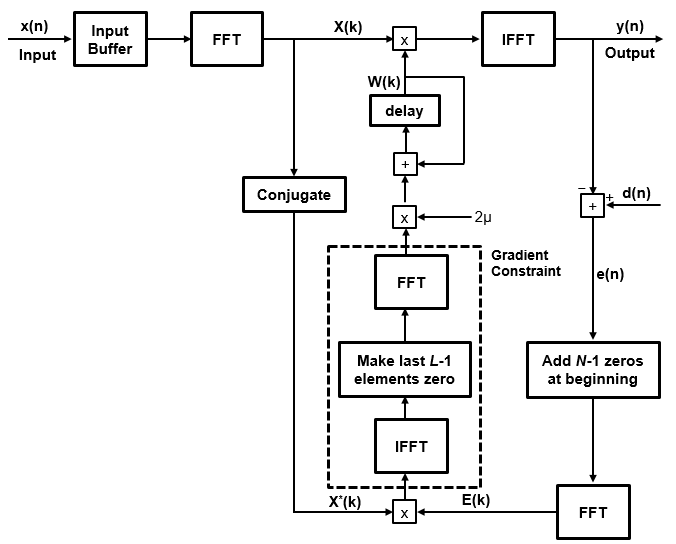
where:
N — Filter length
L — Block length
μ — Step size parameter
x(n) — Input signal
X(k) — Transformed input signal in the frequency domain
d(n) — Desired signal
e(n) — Error between the desired signal and the filter output
E(n) — Transformed error signal in the frequency domain
W(k) — Tap-weights vector in the frequency domain
For more details on how the error is estimated and the tap-weights are adapted, see [2].
References
[1] Shynk, J.J."Frequency-Domain and Multirate Adaptive Filtering." IEEE Signal Processing Magazine, Vol. 9, No. 1, pp. 14–37, Jan. 1992.
[2] Farhang-Boroujeny, B., Adaptive Filters: Theory and Applications, Chichester, England, Wiley, 1998.
[3] Stockham, T. G., Jr. "High Speed Convolution and Correlation." Proceedings of the 1966 Spring Joint Computer Conference, AFIPS, Vol 28, 1966, pp. 229–233.