Get Started with Sensor Fusion and Tracking Toolbox
Sensor Fusion and Tracking Toolbox™ includes tools for designing, simulating, validating, and deploying systems that fuse data from multiple sensors to maintain situational awareness and localization. Reference examples provide a starting point for multi-object tracking and sensor fusion development for surveillance and autonomous systems, including airborne, spaceborne, ground-based, shipborne, and underwater systems.
You can fuse data from real-world sensors such as active and passive radar, sonar, lidar, EO/IR, IMU, and GPS. To further test your tracking algorithms, you can use the simulation environment and sensor models. The toolbox also includes multi-object trackers and estimation filters for evaluating and validating various fusion architectures using track performance metrics such as OSPA and GOSPA.
For simulation acceleration, rapid prototyping, or deployment the toolbox supports C/C++ code generation.
Tutorials
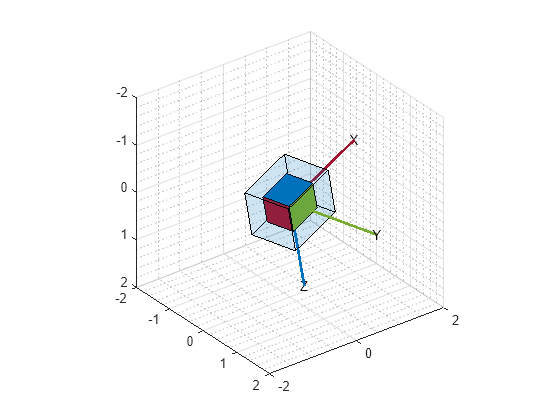
- Orientation, Position, and Coordinate Convention
Learn about toolbox conventions for spatial representation and coordinate systems. - Tracking Simulation Overview
You can build a complete tracking simulation using the functions and objects supplied in this toolbox. - Simulate Radar Detections
Simulate target detections by radar sensors. - Model IMU, GPS, and INS/GPS
Model combinations of inertial sensors and GPS. - Introduction to Estimation Filters
General review of estimation filters provided in the toolbox. - Introduction to Multiple Target Tracking
Introduction to assignment-based multiple target trackers. - Introduction to Tracking Metrics
While designing a multi-object tracking system, it is essential to devise a method to evaluate its performance against the available ground truth. - Use theaterPlot to Visualize Tracking Scenario
This example shows how to use thetheaterPlotobject to visualize various aspects of a tracking scenario.
Toolbox Conventions
Tracking Scenario and Sensors
Inertial Sensor Fusion
Estimation Filters
Multi-Object Tracking
Metrics and Visualization
Related Information
Featured Examples
Introduction to Tracking Scenario and Simulating Sensor Detections
Introduces how to generate synthetic radar detections in a tracking scenario that simulates target motion and sensor detections. Specifically, this example shows:
Design and Simulate Tracking Scenario with Tracking Scenario Designer
Use trackingScenarioDesigner with an existing session file. Using the application, you can add, modify, or remove platforms, monostatic radar sensors, and trajectories of all objects in the scenario. You can also export the scenario as a MATLAB script for further analysis.
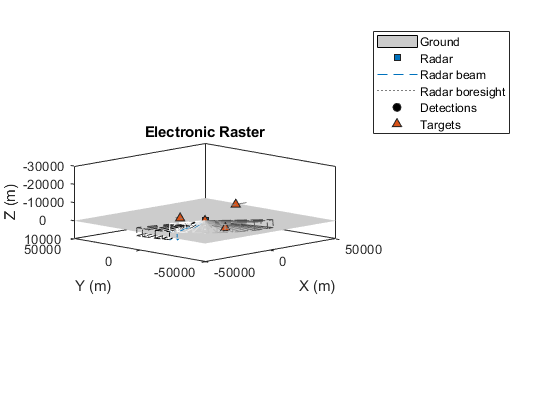
Scanning Radar Mode Configuration
Model different radar scan modes using the fusionRadarSensor. This example shows how to configure the fusionRadarSensor for several commonly used radar scan modes. With this model, you can simulate radars which mechanically scan, electronically scan, and which use both mechanical and electronic scanning. The scan limits in azimuth and elevation are configurable for both mechanical and electronic scan modes.
Estimate Orientation Through Inertial Sensor Fusion
Use 6-axis and 9-axis fusion algorithms to compute orientation. There are several algorithms to compute orientation from inertial measurement units (IMUs) and magnetic-angular rate-gravity (MARG) units. This example covers the basics of orientation and how to use these algorithms.
Tracking Maneuvering Targets
Track maneuvering targets using various tracking filters. The example shows the difference between filters that use a single motion model and multiple motion models.
Automatically Tune Tracking Filter for Multi-Object Tracker
Tune a tracking filter and improve the tracking performance of the tracker.
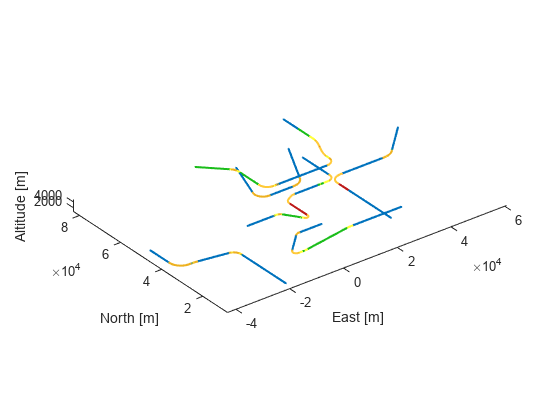
Analyze Truth Data and Define Truth Model
Analyze recorded truth data to model the motion of truth objects and configure a filter to track them.

Convert Detections to objectDetection Format
These examples show how to convert actual detections in the native format of the sensor into objectDetection objects. objectDetection is the standard input format for most tracking filters and trackers in the toolbox. The six examples progressively show how to set up objectDetection with varied tracking scenarios.
Tuning a Multi-Object Tracker
Tune and run a tracker to track multiple objects in the scene. The example explains and demonstrates the importance of key properties of the trackers in the Sensor Fusion and Tracking Toolbox.
Videos
Part 1: What is Sensor Fusion?
An overview of what sensor fusion is and how it helps in the
design of autonomous systems.
Part 2: Fusing Mag, Accel, and Gyro to Estimate Orientation
Use magnetometer, accelerometer, and gyro to estimate an object’s
orientation.
Part 3: Fusing GPS and IMU to Estimate Pose
Use GPS and an IMU to estimate an object’s orientation and
position.
Part 4: Tracking a Single Object With an IMM Filter
Track a single object by estimating state with an interacting
multiple model filter.

Part 5: How to Track Multiple Objects at Once?
Introduce two common problems in multi object tracking: Data
association and track maintenance.
Part 6: What is Track-Level Fusion?
Introduce track-to-track fusion and tracking architecture.