Induction Motor HDL
库:
Motor Control Blockset HDL Support /
Electrical Systems /
Motors
描述
Induction Motor HDL 模块实现三相感应电机。该模块使用三相输入电压来调节各相电流,从而控制电机转矩或转速。
该模块使用采样时间(秒) 参数为定步长双精度和单精度目标生成代码。它支持 FPGA 部署的代码生成并能生成 HDL 兼容代码。
您可以使用配置输入端口指定感应电机参数和工作模式。您还可以使用 Induction Motor Configuration 模块生成所需的配置信号,以在配置输入端口指定该信号。
三相正弦模型电气系统
该模块可实现在静止转子参考 (dq) 系中表示的方程。d 轴与 a 轴对齐。转子参考系中的所有量都是相对于定子来描述的。
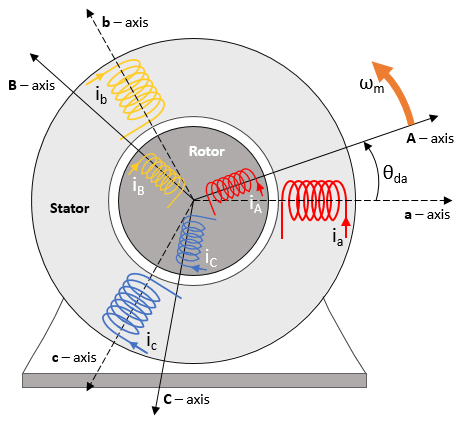
该模块使用以下方程来计算电角速度 (ωem) 和转差速度 (ωslip)。
为了计算相对于转子 A 轴 (dA) 的 dq 转子电角速度,该模块使用定子 a 轴 (da) 转速和转差速度之间的差值:
为了简化磁通、电压和电流变换的方程,该模块使用转子 A 轴参考系:
| 计算 | 方程 |
|---|---|
| 磁通 |
|
| 电流 |
|
| 电感 |
|
| 电磁转矩 |
|
功率不变的 dq 变换,以确保 dq 和三相功率相等 |
|
上述方程用到了以下变量。
ωm | 转子的角速度(弧度/秒) |
ωem | 电气转子转速(弧度/秒) |
ωslip | 电气转子转差速度(弧度/秒) |
ωsyn | 同步转子转速(弧度/秒) |
ωda | dq 定子相对于定子 a 轴的电角速度(弧度/秒) |
ωdA | dq 定子相对于转子 A 轴的电角速度(弧度/秒) |
Θda | dq 定子相对于定子 a 轴的电角(弧度) |
ΘdA | dq 定子相对于转子 A 轴的电角(弧度) |
Lq, Ld | q 轴和 d 轴电感 (H) |
Ls | 定子电感(H) |
Lr | 转子电感 (H) |
Lm | 磁化电感(H) |
Lls | 定子泄漏电感(H) |
Llr | 转子泄漏电感(H) |
vsq, vsd | 定子 q 轴和 d 轴电压 (V) |
isq, isd | 定子 q 轴和 d 轴电流 (A) |
λsq, λsd | 定子 q 轴和 d 轴磁通 (Wb) |
irq, ird | 转子 q 轴和 d 轴电流 (A) |
λrq, λrd | 转子 q 轴和 d 轴磁通 (Wb) |
| va, vb, vc | 定子电压 a、b、c 相 (V) |
| ia, ib, ic | 定子电流 a、b、c 相 (A) |
Rs | 定子绕组的电阻 (ohm) |
Rr | 转子绕组的电阻 (ohm) |
P | 极对数 |
Te | 电磁转矩 (Nm) |
机械系统
电机角速度由下式给出:
上述方程用到了以下变量。
J | 电机和负载的组合惯量 (kgm^2) |
F | 电机和负载的组合粘性摩擦(N·m/(弧度/秒)) |
θm | 电机机械角位置(弧度) |
Tm | 电机轴转矩 (Nm) |
Te | 电磁转矩 (Nm) |
Tf | 电机轴静态摩擦转矩 (Nm) |
ωm | 电机的机械角速度(弧度/秒) |
功率计算
对于电机功率计算,该模块实现下列方程。
| 总线信号 | 描述 | 变量 | 方程 | ||
|---|---|---|---|---|---|
|
| 机械功率 | Pmot | ||
PwrBus | 电功率 | Pbus | |||
PwrElecLoss | 电阻功率损失 | Pelec | |||
PwrMechLoss | 机械功率损失 | Pmech | 当端口配置设置为转矩时: 当端口配置设置为转速时: | ||
PwrMtrStored | 储存的电机功率 | Pstr | |||
上述方程用到了以下变量。
Rs | 定子电阻(欧姆) |
Rr | 转子电阻(Ohm) |
ia, ib, ic | 定子相 a、b 和 c 电流 (A) |
isq, isd | 定子 q 轴和 d 轴电流 (A) |
van, vbn, vcn | 定子相 a、b 和 c 电压 (V) |
ωm | 转子的机械角速度(弧度/秒) |
F | 电机和负载的组合粘性阻尼(N·m/(弧度/秒)) |
Te | 电磁转矩 (Nm) |
Tf | 电机和负载的组合摩擦转矩 (Nm) |
示例
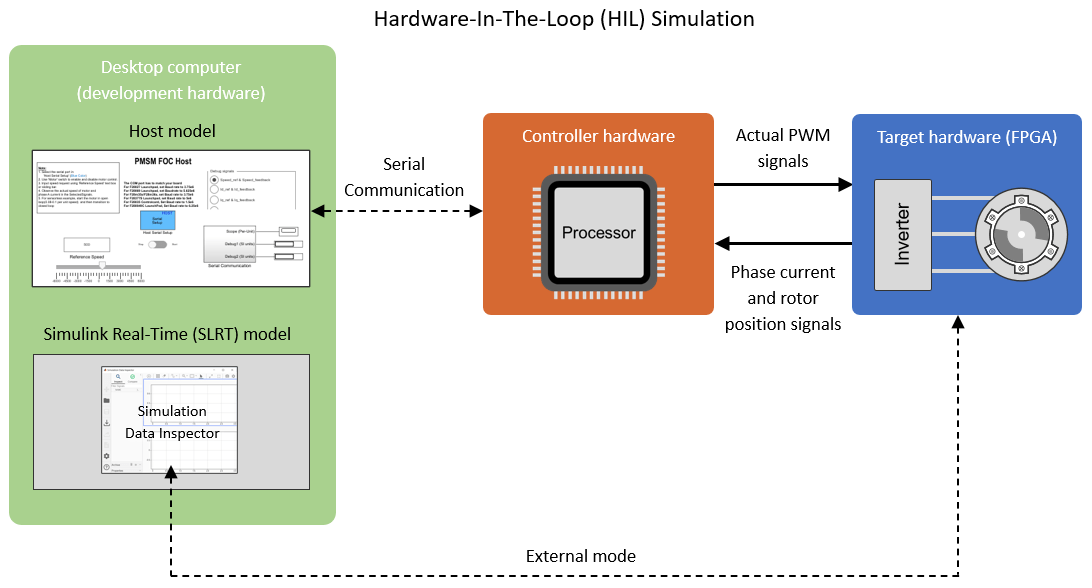
Field-Oriented Control (FOC) of PMSM Using Hardware-in-the-Loop (HIL) Simulation
Uses hardware-in-the-loop (HIL) simulation to implement the field-oriented control (FOC) algorithm to control the speed of a three-phase permanent magnet synchronous motor (PMSM). The FOC algorithm requires rotor position feedback, which is obtained by a quadrature encoder sensor. For more information on FOC, see 磁场定向控制.
端口
输入
输出
参数
扩展功能
版本历史记录
在 R2022b 中推出