用于位置感测的无传感器方法
FOC 算法需要实时转子位置反馈来实现转速控制以及对参考定子电压和反馈电流执行数学变换。传统上,此类算法依赖物理传感器。然而,因为需要更高的精确度和成本效益方面的考虑,无传感器位置估计解决方案可以作为物理传感器的更好替代方案。
无传感器的观测器和算法对于超出基转速的电机运行存在已知限制。我们建议您仅将无传感器示例用于基转速以下的运行。
模块
| Sliding Mode Observer | 计算转子的电气位置和机械转速 |
| Flux Observer | 计算转子的电气位置、磁通量和电转矩 |
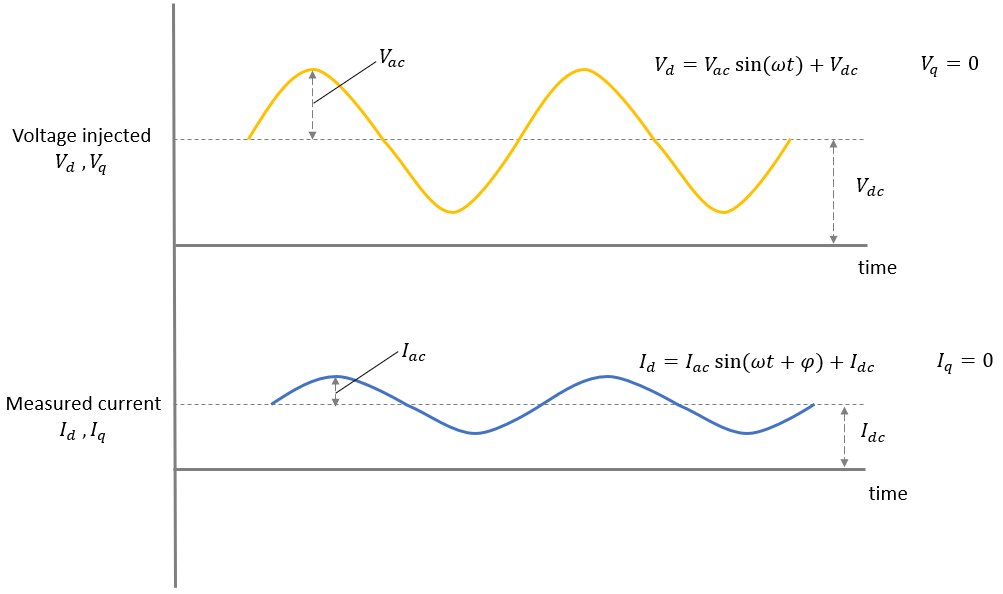
| Pulsating High Freq Observer | 使用脉动高频 (PHF) 注入估计内部 PMSM 的初始转子电气位置 (自 R2022b 起) |
| Extended EMF Observer | 计算永磁同步电机 (PMSM) 的电气位置和机械转速 (自 R2023a 起) |
主题
- How to Tune Sensorless Position Estimators
Tune sensorless position estimators for accurate position and speed measurements.
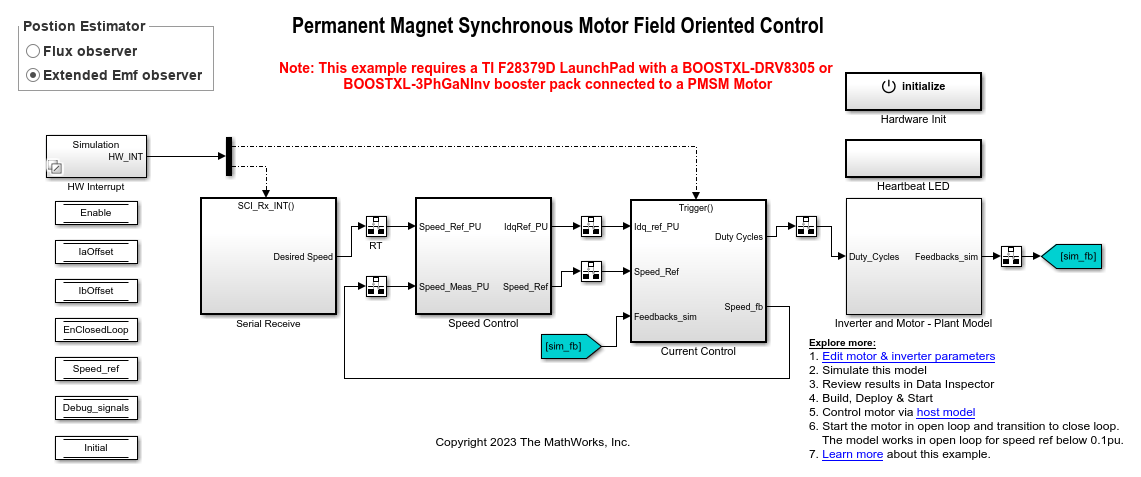
- PMSM 的无传感器磁场定向控制
此示例采用磁场定向控制 (FOC) 方法来控制三相永磁同步电机 (PMSM) 的转速。有关 FOC 的详细信息,请参阅磁场定向控制。
- 感应电机的无传感器磁场定向控制
此示例使用无传感器位置估计来实现磁场定向控制 (FOC) 方法,以控制三相 AC 感应电机 (ACIM) 的转速。有关 FOC 的详细信息,请参阅磁场定向控制。
精选示例
Estimate Initial Rotor Position Using Pulsating High-Frequency and Dual-Pulse Methods
Estimates the initial position (in electrical radians) of a stationary interior PMSM by using pulsating high-frequency (PHF) injection and dual pulse (DP) techniques.
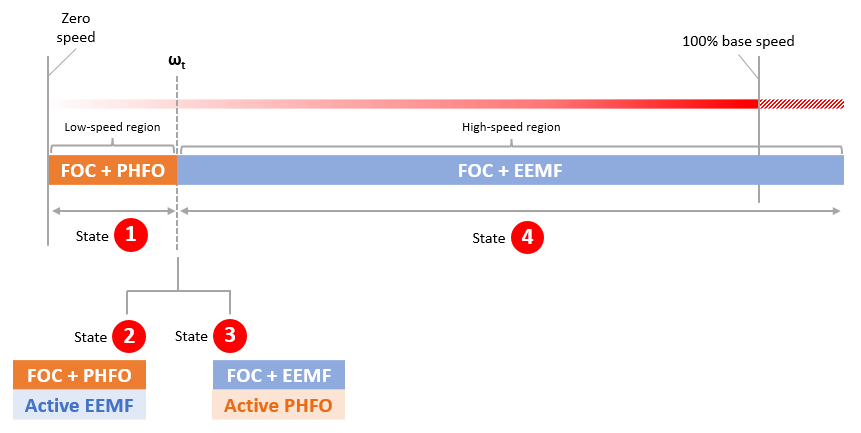
Initial Position Estimation and Field-Weakening Control of IPMSM Using Pulsating High-Frequency Injection and Extended EMF Observer
Uses sensorless techniques such as pulsating high-frequency injection and extended EMF observer to estimate and track motor position to run an interior permanent magnet synchronous motor (IPMSM) operation using field-weakening control (FWC).
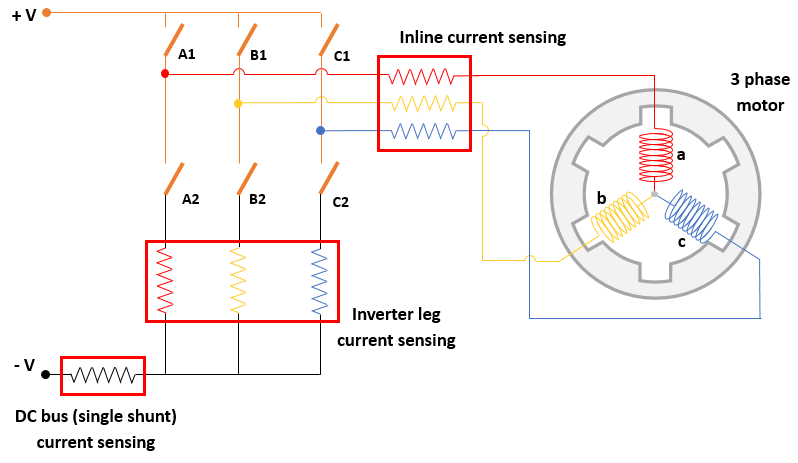
Sensorless Field-Oriented Control of PMSM Using DC Shunt Current Sensing
Implement sensorless field-oriented control (FOC) using only a single DC bus-based current measurement to run a permanent magnet synchronous motor (PMSM).
使用基于 I-F 控制的启动的 PMSM 无传感器磁场定向控制
此示例使用无传感器位置估计和基于 I-F 控制的启动来实现磁场定向控制 (FOC),以控制三相永磁同步电机 (PMSM) 的转速。