addEgo
Add ego bodies to capsule list
Description
addEgo(
adds one or more ego bodies to the 2-D dynamic capsule list with the specified ID, state,
and geometry values given in capsuleListObj,egoStruct)egoStruct.
status = addEgo(capsuleListObj,egoStruct)
Examples
Build an ego body path and maintain obstacle states using the dynamicCapsuleList object. Visualize the states of all objects in the environment at different timestamps. Validate the path of the ego body by checking for collisions with obstacles in the environment.
Create the dynamicCapsuleList object. Extract the maximum number of steps to use as the number of time stamps for your object paths.
obsList = dynamicCapsuleList; numSteps = obsList.MaxNumSteps;
Add Ego Body
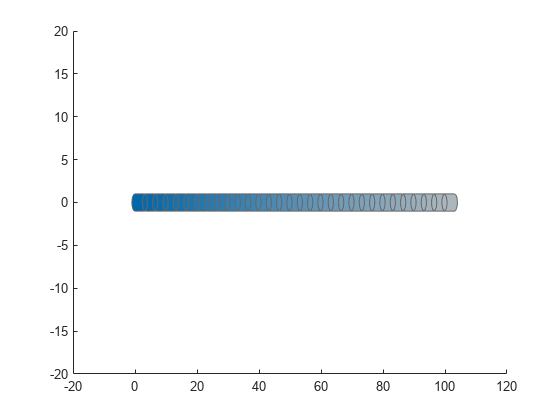
Define an ego body by specifying the ID, geometry, and state together in a structure. The capsule geometry has a length of 3 m and radius of 1 m. Specify the state as a linear path from x = 0m to x = 100m*.*
egoID1 = 1; geom = struct("Length",3,"Radius",1,"FixedTransform",eye(3)); states = linspace(0,1,obsList.MaxNumSteps)'.*[100 0 0]; egoCapsule1 = struct('ID',egoID1,'States',states,'Geometry',geom); addEgo(obsList,egoCapsule1); show(obsList,"TimeStep",[1:numSteps]); ylim([-20 20])
Add Obstacles
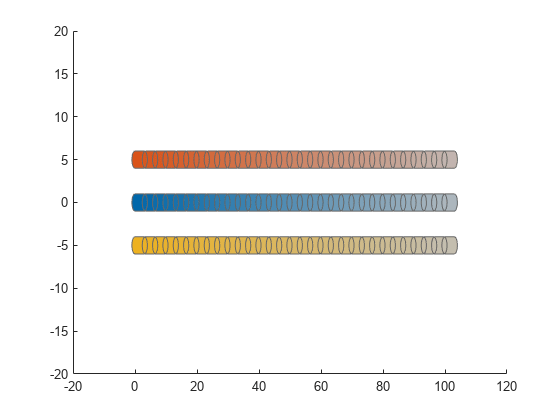
Specify states for two obstacles that are separated from the ego body by 5 m in opposite directions on the y-axis. Assume the obstacles have the same geometry geom as the ego body.
obsState1 = states + [0 5 0]; obsState2 = states + [0 -5 0]; obsCapsule1 = struct('ID',1,'States',obsState1,'Geometry',geom); obsCapsule2 = struct('ID',2,'States',obsState2,'Geometry',geom); addObstacle(obsList,obsCapsule1); addObstacle(obsList,obsCapsule2); show(obsList,"TimeStep",[1:numSteps]); ylim([-20 20])
Update Obstacles
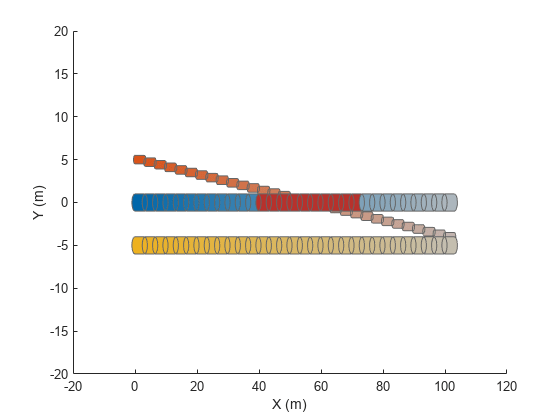
Alter your obstacle locations and geometry dimensions over time. Use the previously generated structure, modify the fields, and update the obstacles using the updateObstacleGeometry and updateObstaclePose object functions. Reduces the radius of the first obstacle to 0.5 m, and change the path to move it towards the ego body.
obsCapsule1.Geometry.Radius = 0.5; obsCapsule1.States = ... [linspace(0,100,numSteps)' ... % x linspace(5,-4,numSteps)' ... % y zeros(numSteps,1)]; % theta updateObstacleGeometry(obsList,1,obsCapsule1); updateObstaclePose(obsList,1,obsCapsule1);
Check for Collisions
Visualize the new paths. Show where collisions between the ego body and an obstacle, which the display highlights in red. Notice that collisions between the obstacles are not checked.
show(obsList,"TimeStep",[1:numSteps],"ShowCollisions",1); ylim([-20 20]) xlabel("X (m)") ylabel("Y (m)")
Programmatically check for collisions by using the checkCollision object function. The function returns a vector of logical values that indicates the status of each time step. The vector is transposed for display purposes.
collisions = checkCollision(obsList)'
collisions = 1×31 logical array
0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 1 1 0 0 0 0 0 0 0 0 0
To validate paths with a large number of steps, use the any function on the vector of collision values.
if any(collisions) disp("Collision detected.") end
Collision detected.
Update Ego Path
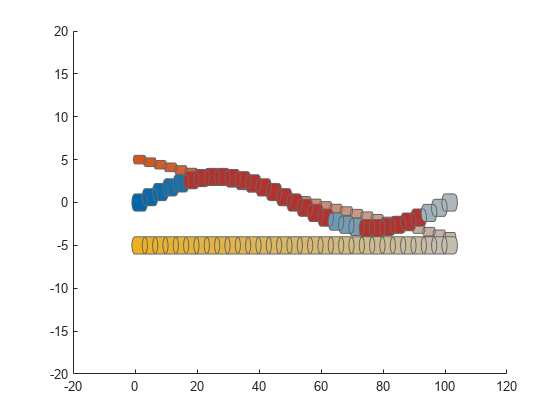
Specify a new path for the ego body. Visualize the paths again, displaying collisions.
egoCapsule1.States = ... [linspace(0,100,numSteps)' ... % x 3*sin(linspace(0,2*pi,numSteps))' ... % y zeros(numSteps,1)]; % theta updateEgoPose(obsList,1,egoCapsule1); show(obsList,"TimeStep",[1:numSteps],"ShowCollisions",1); ylim([-20 20])
Input Arguments
Dynamic capsule list, specified as a dynamicCapsuleList object.
Ego body parameters, specified as an N-element structure or a structure array, where N is the number of added ego bodies. The fields of each structure define the ID, geometry, and states of an ego body:
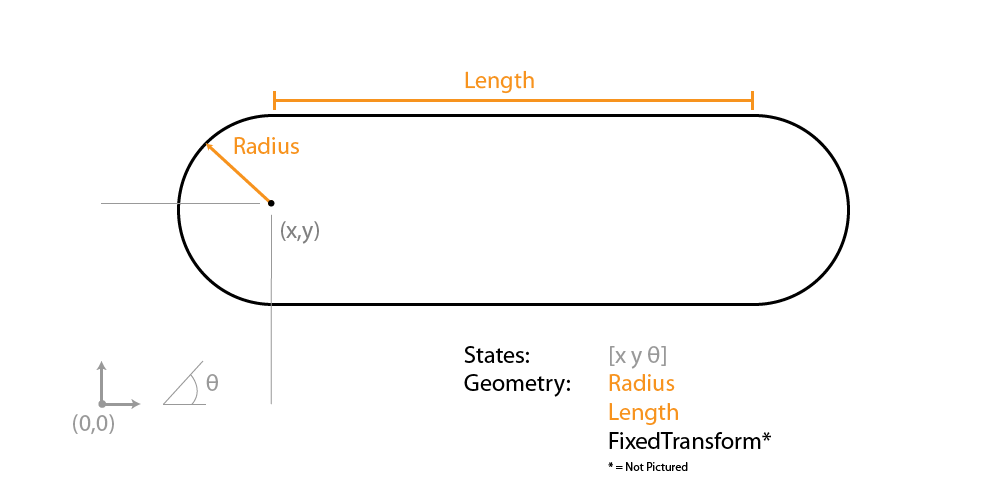
ID–– Integer that identifies each object. Stored in theEgoIDsproperty of thedynamicCapsuleListobject specified by thecapsuleListObjargument.States–– Location and orientation of the object as an M-by-3 matrix, where each row is of form[x y theta], and M is the number of states for the specified ego body in the world frame. The list of states assumes each state is separated by a fixed time interval. xy-positions are in meters andthetais in radians.Geometry–– Structure with fieldsLength,Radius, andFixedTransform. These fields define the size of the capsule-based object using the specified length for the cylinder and semicircle radius for the end caps. To shift the capsule geometry from the default origin, specify theFixedTransformfield as a fixed transform relative to the local frame of the capsule. To keep the default capsule origin, specify the transform aseye(3).
Output Arguments
Extended Capabilities
Version History
Introduced in R2020b