navPathControl
Description
The navPathControl object stores paths that are typically created by
control-based path planners like the plannerControlRRT object. The
navPathControl object represents paths as a sequence of states, controls,
durations, and targets. This object associates each path with a specific state propagator,
which propagates the control commands to determine the resulting states.
This object specifies states and targets in the path in the state space of propagator. Controls are outputs from a controller that are used to update your systems state during propagation. This object applies each control for an associated duration. Controls can be reference signals or direct inputs to an integrator depending on your system design.
Creation
Syntax
Description
pathObj = navPathControl(propagator)propagator argument specifies the
StatePropagator
pathObj = navPathControl(propagator,states,controls,targets,durations)
Properties
Object Functions
append | Add states to end of path |
interpolate | Interpolate path based on propagator step size |
pathDuration | Total elapsed duration of control path |
Examples
Plan control paths for a bicycle kinematic model with the mobileRobotPropagator object. Specify a map for the environment, set state bounds, and define a start and goal location. Plan a path using the control-based RRT algorithm, which uses a state propagator for planning motion and the required control commands.
Set State and State Propagator Parameters
Load a ternary map matrix and create an occupancyMap object. Create the state propagator using the map. By default, the state propagator uses a bicycle kinematic model.
load('exampleMaps','ternaryMap') map = occupancyMap(ternaryMap,10); propagator = mobileRobotPropagator(Environment=map); % Bicycle model
Set the state bounds on the state space based on the map world limits.
propagator.StateSpace.StateBounds(1:2,:) = ...
[map.XWorldLimits; map.YWorldLimits];Plan Path
Create the path planner from the state propagator.
planner = plannerControlRRT(propagator);
Specify the start and goal states.
start = [10 15 0]; goal = [40 30 0];
Plan a path between the states. For repeatable results, reset the random number generator before planning. The plan function outputs a navPathControl object, which contains the states, control commands, and durations.
rng("default")
path = plan(planner,start,goal)path =
navPathControl with properties:
StatePropagator: [1×1 mobileRobotPropagator]
States: [192×3 double]
Controls: [191×2 double]
Durations: [191×1 double]
TargetStates: [191×3 double]
NumStates: 192
NumSegments: 191
Visualize Results
Visualize the map and plot the path states.
show(map) hold on plot(start(1),start(2),"rx") plot(goal(1),goal(2),"go") plot(path.States(:,1),path.States(:,2),"b") hold off
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 4 objects of type image, line. One or more of the lines displays its values using only markers](../../examples/nav/win64/PlanKinodynamicPathWithControlsForMobileRobotExample_01.png)
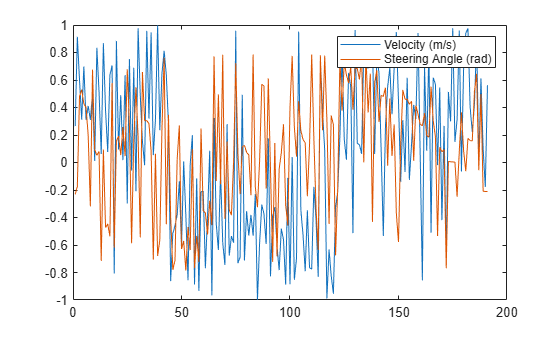
Display the [v psi] control inputs of forward velocity and steering angle.
plot(path.Controls) ylim([-1 1]) legend(["Velocity (m/s)","Steering Angle (rad)"])
Set State and State Propagator Parameters
Load a ternary map matrix and create an occupancyMap object.
load("exampleMaps","ternaryMap") map = occupancyMap(ternaryMap,10);
Create a state propagator for a bicycle kinematic model using the map.
propagator = mobileRobotPropagator(Environment=map);
Set the state bounds on the state space based on the map world limits.
propagator.StateSpace.StateBounds(1:2,:) = [map.XWorldLimits;
map.YWorldLimits];Plan Path
Create the path planner from the state propagator.
planner = plannerControlRRT(propagator);
Specify the start and goal states.
start = [10 15 0]; goal = [40 30 0];
Plan a path between the states. For repeatable results, reset the random number generator before planning.
rng("default")
path = plan(planner,start,goal);Check the total elapsed duration of the control path.
pathDuration(path)
ans = 102.4000
Interpolate the path to the control step size of the propagator.
interpolate(path)
Visualize the path.
figure show(map) hold on plot(start(1),start(2),"rx") plot(goal(1),goal(2),"go") plot(path.States(:,1),path.States(:,2),"b") hold off
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 4 objects of type image, line. One or more of the lines displays its values using only markers](../../examples/nav/win64/CombineTwoKinodynamicPathsWithControlsForMobileRobotExample_01.png)
Plan Return Path
Plan a second path from the end of the previous path location back to the start.
path2 = plan(planner,path.States(end,:),start);
Check the total elapsed duration of the second path.
pathDuration(path2)
ans = 100.3000
Visualize the path.
figure show(map) hold on plot(start(1),start(2),"rx") plot(goal(1),goal(2),"go") plot(path2.States(:,1),path2.States(:,2),"m") hold off
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 4 objects of type image, line. One or more of the lines displays its values using only markers](../../examples/nav/win64/CombineTwoKinodynamicPathsWithControlsForMobileRobotExample_02.png)
Combine Paths
Extract the sequence of motions from the second path.
states = path2.States(2:end,:); controls = path2.Controls; targets = path2.TargetStates; durations = path2.Durations;
Append this sequence to the end of the first path.
append(path,states,controls,targets,durations)
Interpolate the new segments in the original path.
interpolate(path)
Check the total elapsed duration of the final path.
pathDuration(path)
ans = 102.4000
Visualize the path.
figure show(map) hold on plot(start(1),start(2),"rx") plot(goal(1),goal(2),"go") plot(path.States(:,1),path.States(:,2),"b") hold off
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 4 objects of type image, line. One or more of the lines displays its values using only markers](../../examples/nav/win64/CombineTwoKinodynamicPathsWithControlsForMobileRobotExample_03.png)
Version History
Introduced in R2021b