fminimax
求解 minimax 约束问题
语法
说明
fminimax 寻找能够最小化一组目标函数最大值的点。
此问题可以包括任何类型的约束。具体来说,fminimax 寻找由下式指定的问题的最小值:
其中 b 和 beq 是向量,A 和 Aeq 是矩阵,c(x)、ceq(x) 和 F(x) 是返回向量的函数。F(x)、c(x) 和 ceq(x) 可以是非线性函数。
x、lb 和 ub 可以作为向量或矩阵传递;请参阅矩阵参量。
您还可以使用以下等式和 fminimax 求解最大最小化问题
您可以求解以下形式的问题
(求解过程中需要使用 AbsoluteMaxObjectiveCount 选项。)请参阅使用一个目标的绝对值求解 minimax 问题。
示例
创建 sin 和 cos 函数及其在区间 [–pi,pi] 上的最大值的绘图。
t = linspace(-pi,pi); plot(t,sin(t),'r-') hold on plot(t,cos(t),'b-'); plot(t,max(sin(t),cos(t)),'ko') legend('sin(t)','cos(t)','max(sin(t),cos(t))','Location','NorthWest')
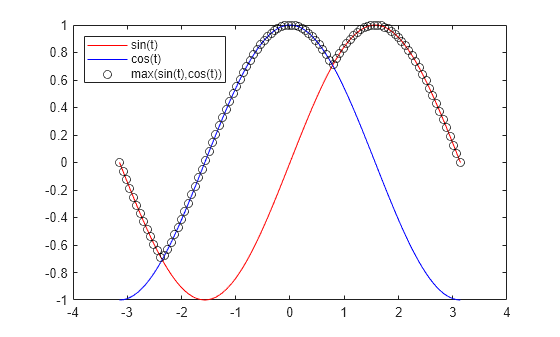
该绘图显示最大值的两个局部最小值,其中一个接近 1,另一个接近 -2。求接近 1 的最小值。
fun = @(x)[sin(x);cos(x)]; x0 = 1; x1 = fminimax(fun,x0)
Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x1 = 0.7854
求接近 -2 的最小值。
x0 = -2; x2 = fminimax(fun,x0)
Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x2 = -2.3562
此示例中的目标函数是线性函数加上常量的形式。有关目标函数的说明和绘图,请参阅比较 fminimax 和 fminunc。
将目标函数设置为形式为 的三个线性函数, 分别为三个向量, 分别为三个常量。
a = [1;1]; b = [-1;1]; c = [0;-1]; a0 = 2; b0 = -3; c0 = 4; fun = @(x)[x*a+a0,x*b+b0,x*c+c0];
在不等式 x(1) + 3*x(2) <= –4 线束下求 minimax 点。
A = [1,3]; b = -4; x0 = [-1,-2]; x = fminimax(fun,x0,A,b)
Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x = 1×2
-5.8000 0.6000
此示例中的目标函数是线性函数加上常量的形式。有关目标函数的说明和绘图,请参阅比较 fminimax 和 fminunc。
将目标函数设置为形式为 的三个线性函数, 分别为三个向量, 分别为三个常量。
a = [1;1]; b = [-1;1]; c = [0;-1]; a0 = 2; b0 = -3; c0 = 4; fun = @(x)[x*a+a0,x*b+b0,x*c+c0];
设置边界 –2 <= x(1) <= 2 和 –1 <= x(2) <= 1,并从 [0,0] 开始求解 minimax 问题。
lb = [-2,-1];
ub = [2,1];
x0 = [0,0];
A = []; % No linear constraints
b = [];
Aeq = [];
beq = [];
[x,fval] = fminimax(fun,x0,A,b,Aeq,beq,lb,ub)Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x = 1×2
-0.0000 1.0000
fval = 1×3
3.0000 -2.0000 3.0000
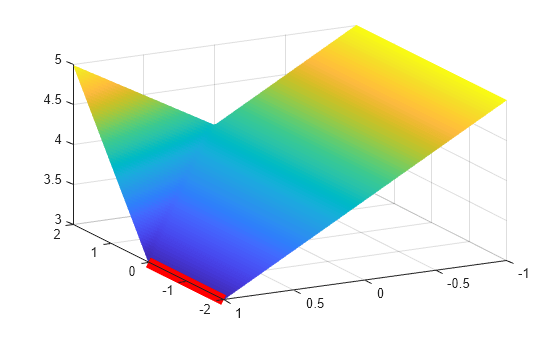
在本例中,解不唯一。许多点满足约束,并且具有相同的 minimax 值。绘制表示三个目标函数的最大值的曲面,并绘制一条红线显示具有相同 minimax 值的点。
[X,Y] = meshgrid(linspace(-2,2),linspace(-1,1)); Z = max(fun([X(:),Y(:)]),[],2); Z = reshape(Z,size(X)); surf(X,Y,Z,'LineStyle','none') view(-118,28) hold on line([-2,0],[1,1],[3,3],'Color','r','LineWidth',8) hold off
此示例中的目标函数是线性函数加上常量的形式。有关目标函数的说明和绘图,请参阅比较 fminimax 和 fminunc。
将目标函数设置为形式为 的三个线性函数, 分别为三个向量, 分别为三个常量。
a = [1;1]; b = [-1;1]; c = [0;-1]; a0 = 2; b0 = -3; c0 = 4; fun = @(x)[x*a+a0,x*b+b0,x*c+c0];
unitdisk 函数表示非线性不等式约束 。
type unitdiskfunction [c,ceq] = unitdisk(x) c = x(1)^2 + x(2)^2 - 1; ceq = [];
从 x0 = [0,0] 开始,在 unitdisk 约束下求解 minimax 问题。
x0 = [0,0];
A = []; % No other constraints
b = [];
Aeq = [];
beq = [];
lb = [];
ub = [];
nonlcon = @unitdisk;
x = fminimax(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon)Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x = 1×2
-0.0000 1.0000
通过使用 AbsoluteMaxObjectiveCount 选项,fminimax 可以最小化 的前几个值的 或 的最大值。要最小化目标的 的绝对值,需要排列目标函数值,使 到 是绝对值最小化的目标,并将 AbsoluteMaxObjectiveCount 选项设置为 k。
此示例要最小化 sin 和 cos 的最大值,将 sin 指定为第一个目标,并将 AbsoluteMaxObjectiveCount 设置为 1。
fun = @(x)[sin(x),cos(x)]; options = optimoptions('fminimax','AbsoluteMaxObjectiveCount',1); x0 = 1; A = []; % No constraints b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; x1 = fminimax(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x1 = 0.7854
从 x0 = –2 开始尝试。
x0 = -2; x2 = fminimax(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x2 = -3.1416
绘制函数。
t = linspace(-pi,pi); plot(t,max(abs(sin(t)),cos(t)))
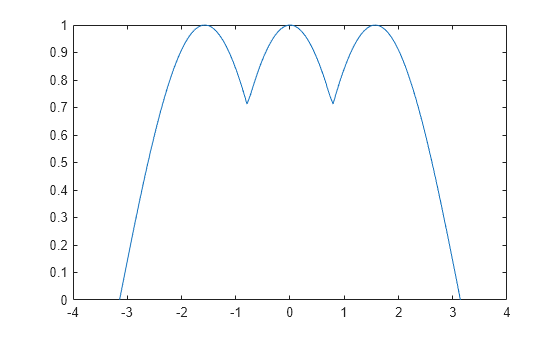
要查看 AbsoluteMaxObjectiveCount 选项的效果,请将此绘图与示例最小化 sin 和 cos 的最大值中的绘图进行比较。
获取 minimax 点的位置和目标函数的值。有关目标函数的说明和绘图,请参阅比较 fminimax 和 fminunc。
将目标函数设置为形式为 的三个线性函数, 分别为三个向量, 分别为三个常量。
a = [1;1]; b = [-1;1]; c = [0;-1]; a0 = 2; b0 = -3; c0 = 4; fun = @(x)[x*a+a0,x*b+b0,x*c+c0];
将初始点设置为 [0,0],并求 minimax 点和值。
x0 = [0,0]; [x,fval] = fminimax(fun,x0)
Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x = 1×2
-2.5000 2.2500
fval = 1×3
1.7500 1.7500 1.7500
所有三个目标函数在 minimax 点都有相同的值。无约束问题通常至少有两个在解处相等的目标,因为如果一个点不是任何目标的局部最小值并且只有一个目标具有最大值,则最大目标可能会降低。
此示例中的目标函数是线性函数加上常量的形式。有关目标函数的说明和绘图,请参阅比较 fminimax 和 fminunc。
将目标函数设置为形式为 的三个线性函数, 分别为三个向量, 分别为三个常量。
a = [1;1]; b = [-1;1]; c = [0;-1]; a0 = 2; b0 = -3; c0 = 4; fun = @(x)[x*a+a0,x*b+b0,x*c+c0];
在不等式 x(1) + 3*x(2) <= –4 线束下求 minimax 点。
A = [1,3]; b = -4; x0 = [-1,-2];
设置选项以显示迭代输出,并获得所有求解器输出。
options = optimoptions('fminimax','Display','iter'); Aeq = []; % No other constraints beq = []; lb = []; ub = []; nonlcon = []; [x,fval,maxfval,exitflag,output,lambda] =... fminimax(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
Objective Max Line search Directional
Iter F-count value constraint steplength derivative Procedure
0 4 0 6
1 9 5 0 1 0.981
2 14 4.889 8.882e-16 1 -0.302 Hessian modified twice
3 19 3.4 8.132e-09 1 -0.302 Hessian modified twice
Local minimum possible. Constraints satisfied.
fminimax stopped because the size of the current search direction is less than
twice the value of the step size tolerance and constraints are
satisfied to within the value of the constraint tolerance.
<stopping criteria details>
x = 1×2
-5.8000 0.6000
fval = 1×3
-3.2000 3.4000 3.4000
maxfval = 3.4000
exitflag = 4
output = struct with fields:
iterations: 4
funcCount: 19
lssteplength: 1
stepsize: 6.0684e-10
algorithm: 'active-set'
firstorderopt: []
constrviolation: 8.1323e-09
message: 'Local minimum possible. Constraints satisfied.↵↵fminimax stopped because the size of the current search direction is less than↵twice the value of the step size tolerance and constraints are ↵satisfied to within the value of the constraint tolerance.↵↵<stopping criteria details>↵↵Optimization stopped because the norm of the current search direction, 4.555377e-10,↵is less than 2*options.StepTolerance = 1.000000e-06, and the maximum constraint ↵violation, 8.132313e-09, is less than options.ConstraintTolerance = 1.000000e-06.'
lambda = struct with fields:
lower: [2×1 double]
upper: [2×1 double]
eqlin: [0×1 double]
eqnonlin: [0×1 double]
ineqlin: 0.2000
ineqnonlin: [0×1 double]
检查返回的信息:
两个目标函数值在解处相等。
求解器在经过 4 次迭代和 19 次函数计算后收敛。
lambda.ineqlin值非零,表示线性约束在解处为活动状态。
输入参数
输出参量
算法
fminimax 将 minimax 问题转换为目标达到问题,然后使用 fgoalattain 求解转换后的目标达到问题,从而对 minimax 问题求解。转换将所有目标设置为 0,并将所有权重设置为 1。请参阅多目标优化算法中的公式 1。
替代功能
App
优化实时编辑器任务为 fminimax 提供了一个可视化界面。
扩展功能
版本历史记录
在 R2006a 之前推出