showWorkspaceAnalysis
Plot robot workspace encoded by manipulability index of robot end effector
Since R2024b
Description
ax = showWorkspaceAnalysis(workspace,manipIndex)
ax = showWorkspaceAnalysis(___,Name=Value)Parent=ax2 specifies the parent
axes on which to plot the workspace analysis.
Examples
Load the robot model for the Universal Robots UR5e manipulator, and specify the last body in the robot model "tool0" as the end effector.
robot = loadrobot("universalUR5e",DataFormat="row"); show(robot); ee = "tool0";
Generate the workspace for the robot in an obstacle-free environment, using "tool0" as the end effector of the robot model, and ignoring self-collisions in the robot model during collision checking.
rng default [workspace,configs] = generateRobotWorkspace(robot,{},ee,IgnoreSelfCollision="on");
Calculate the manipulability, using Yoshikawa index, for each configuration in the workspace.
mIdx = manipulabilityIndex(robot,configs,ee);
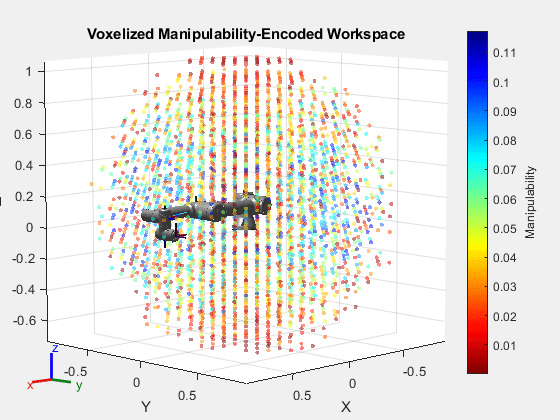
Show the robot, and then plot the workspace analysis. Voxelize the workspace to make it easier to see the high-manipulability areas.
hold on showWorkspaceAnalysis(workspace,mIdx,Voxelize=true) axis auto title("Voxelized Manipulability-Encoded Workspace") hold off
Get the configurations with a manipulability index greater than 0.1.
highMIdxConfigs = configs(mIdx>0.1,:)
highMIdxConfigs = 105×6
3.9154 0.4125 -0.9379 5.5167 4.7242 0.6303
1.0622 4.1458 -1.3166 -1.2245 4.5497 1.4419
-5.7293 2.3464 1.4688 -0.7895 -1.5100 6.0276
3.2651 -2.6273 -1.3984 -6.2064 -1.5744 -0.7925
-2.4593 -2.6281 -1.6178 5.4875 4.5263 -1.2915
-2.7437 -0.2400 1.1615 -3.6661 1.3592 -2.1843
1.2724 -2.2470 -1.3553 -0.8128 5.0738 5.3420
-1.1097 3.6946 -0.9852 -0.4699 -1.6610 2.2566
-2.1939 0.6961 -1.2854 -1.6824 -1.8969 1.6364
2.7559 0.2960 -1.5027 -0.0870 4.4716 2.8200
3.5406 3.8625 -1.4762 4.9750 1.3570 -6.1022
-2.0595 5.6969 1.5740 -2.0870 1.6692 -1.0613
-0.0951 3.1191 -1.1879 -6.1864 1.4529 -1.7898
-3.9272 -2.4752 -1.1262 -0.7288 -1.7356 1.5783
-4.2214 2.3661 0.9005 4.0382 -1.5262 -4.8770
⋮
Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2024b
See Also
rigidBodyTree | manipulabilityIndex | generateRobotWorkspace