skyplot
Plot satellite azimuth and elevation data
Syntax
Description
skyplot(
creates a sky plot using the azimuth and elevation data specified as matrices in degrees.
Azimuth angles are measured in degrees, clockwise-positive from the North direction.
Elevation angles are measured from the horizon line with 90 degrees being directly up. For
details about the sky plot figure elements, see Main Sky Plot Elements.azdata,eldata)
skyplot( specifies the azimuth and
elevation data in a structure with fields status)SatelliteAzimuth and
SatelliteElevation.
skyplot(___,
specifies options using one or more name-value arguments in addition to the input
arguments in previous syntaxes. The name-value arguments are properties of the
Name,Value)SkyPlotChart object. For a list of properties, see SkyPlotChart Properties.
skyplot( creates the
sky plot in the figure, panel, or tab specified by parent,___)parent.
h = skyplot(___)SkyPlotChart object, h. Use
h to modify the properties of the chart after creating it. For a
list of properties, see SkyPlotChart Properties.
Examples
Create a GNSS sensor model as a gnssSensor (Navigation Toolbox) System object™.
gnss = gnssSensor;
Specify the position and velocity of the sensor. Simulate the sensor readings and get status from visible satellites. Store the azimuth and elevation angles as vectors.
pos = [0 0 0]; vel = [0 0 0]; [~, ~, status] = gnss(pos, vel); satAz = status.SatelliteAzimuth; satEl = status.SatelliteElevation;
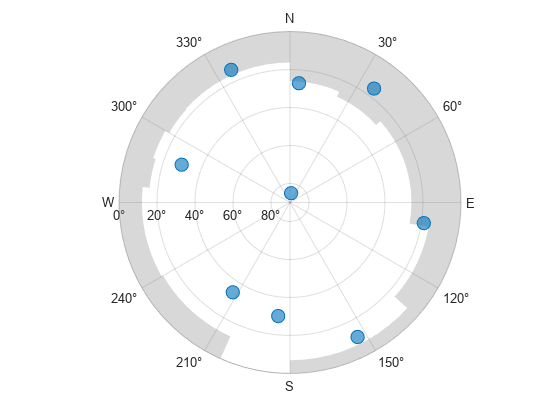
Create random local elevation masks, with a maximum elevation of 30 degrees, to act as the local environment.
rng(8) terrainMaskElevations = 30*rand(1,12); % elevations (degrees) terrainMaskEdges = [0 24 48 100 132 180 204 240 276 288 300 312 360]; % azimuth edges (degrees)
Plot the satellite positions with the elevation masks.
skyplot(satAz,satEl,MaskElevation=terrainMaskElevations,MaskAzimuthEdges=terrainMaskEdges);
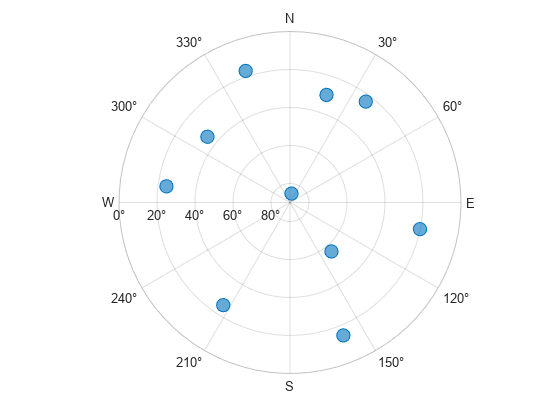
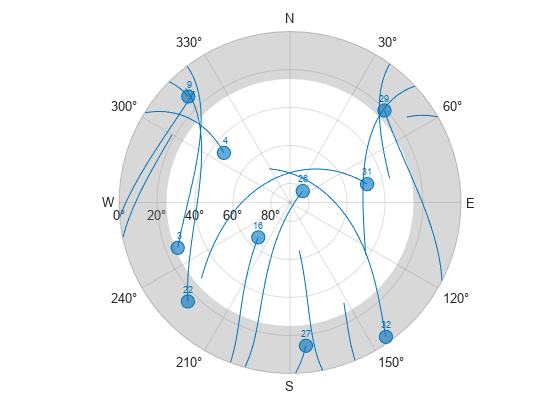
Animate the trajectory of satellite positions over time from a GNSS sensor.
Initialize the sky plot figure. Specify the relevant time-stepping information.
skyplotHandle = skyplot(0,0);
numHours = 12; dt = 100; numSeconds = numHours * 60 * 60; numSimSteps = numSeconds/dt;
Create a GNSS sensor model as a gnssSensor (Navigation Toolbox) System Object™.
gnss = gnssSensor('SampleRate', 1/dt); Iterate through the time steps and do the following:
Simulate the sensor readings. Specify the zero position and velocity for the stationary sensor.
Store the azimuth and elevation angles as vectors.
Set the
AzimuthDataandElevationDataproperties of theSkyPlotCharthandle directly.
for i = 1:numSimSteps [~, ~, status] = gnss([0 0 0],[0 0 0]); satAz = status.SatelliteAzimuth; satEl = status.SatelliteElevation; set(skyplotHandle,'AzimuthData',satAz,'ElevationData',satEl); drawnow end
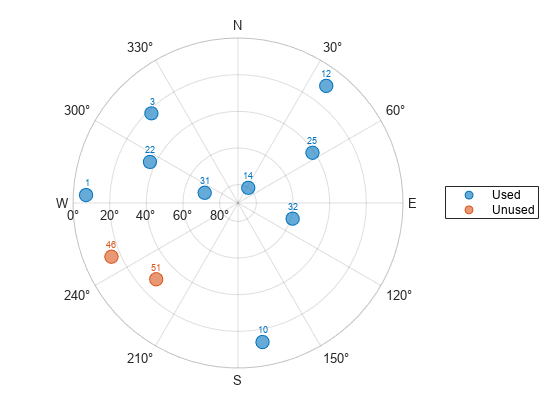
Load the azimuth and elevation data from a logfile generated by an Adafruit® GPS satellite sensor. The data provided in this example contains the azimuth and elevation of each satellite and the pseudorandom noise (PRN) codes. Store these values as vectors.
load('gpsHWInfo','hwInfo') satAz = hwInfo.SatelliteAzimuths; satEl = hwInfo.SatelliteElevations; prn = hwInfo.SatellitePRNs;
Separate the satellites based on the PRN codes. To correlate each position with a group, create a categorical array. For this set of satellites, only the ones with PRNs less than 32 are used in the positioning solution.
isUnused = (prn > 32); group = categorical(isUnused,[false true],["Used in Positioning Solution" "Unused"]);
Visualize the satellites and specify the categorical groups in the GroupData name-value argument. Specify the PRN as the label for each point. Show the legend.
skyplot(satAz,satEl,prn,GroupData=group) legend('Used','Unused')
Specify the receiver position, RINEX navigation file, mask angle, time step size, and number of hours of data to sample from the RINEX file.
recPos = [42 -71 50]; navfile = "GODS00USA_R_20211750000_01D_GN.rnx"; maskAngle = 25; dt = 60; % seconds numHours = 4;
Read the navigation file, and get the GPS data of all satellites captured in the file.
data = rinexread(navfile); [~,satIdx] = unique(data.GPS.SatelliteID); navmsg = data.GPS(satIdx,:);
Set the starting time to the initial time of the navigation message. Then, create the time vector t.
startTime = navmsg.Time(1); secondsPerHour = 3600; timeElapsed = 0:dt:(secondsPerHour*numHours); t = startTime + seconds(timeElapsed);
Initialize vectors for azimuth and elevation. Then, collect azimuth and elevation data at times t for all satellites.
numSats = numel(navmsg.SatelliteID); allAz = NaN(numel(t),numSats); allEl = allAz; for idx = 1:numel(t) [satPos,~,satID] = gnssconstellation(t(idx),RINEXData=navmsg); [az,el,vis] = lookangles(recPos,satPos,maskAngle); allAz(idx,:) = az; allEl(idx,:) = el; end
Mark all satellites below the horizon with an elevation less than 0 as missing.
allEl(allEl < 0) = missing;
Display the satellite trajectories as an animation by creating a skyplot and updating the AzimuthData and ElevationData properties.
figure sp = skyplot(allAz(1,:),allEl(1,:),satID,MaskElevation=maskAngle); for idx = 1:size(allAz, 1) set(sp,AzimuthData=allAz(1:idx,:),ElevationData=allEl(1:idx,:)); drawnow limitrate end
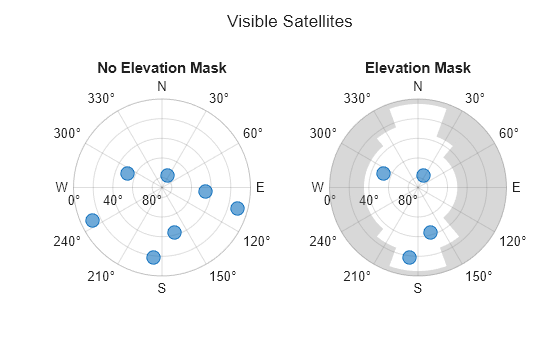
Specify a custom elevation mask to model the effect of nearby buildings on satellite visibility. In this scenario, the receiver is positioned on a city road, with higher obstructions to the east and west.
recPos = [42 -71 50]; maskAngles = [5 35 50 25 5 25 35 25 5]; azEdges = [0 20 40 140 160 200 220 320 340 360];
Set the observation time and obtain satellite positions for that instant.
t = datetime(2025,10,1); satPos = gnssconstellation(t);
Determine which satellites are visible, first without any mask, then apply the elevation mask to represent the urban obstructions.
[az,el,visMask] = lookangles(recPos,satPos,maskAngles,azEdges); [az,el,visNoMask] = lookangles(recPos,satPos);
Visualize the results by comparing satellite visibility with and without the elevation mask.
t1 = tiledlayout(1,2); title(t1,"Visible Satellites"); nexttile skyplot(az(visNoMask),el(visNoMask)) title("No Elevation Mask") nexttile skyplot(az(visMask),el(visMask),MaskElevation=maskAngles,MaskAzimuthEdges=azEdges) title("Elevation Mask")
Input Arguments
Output Arguments
More About
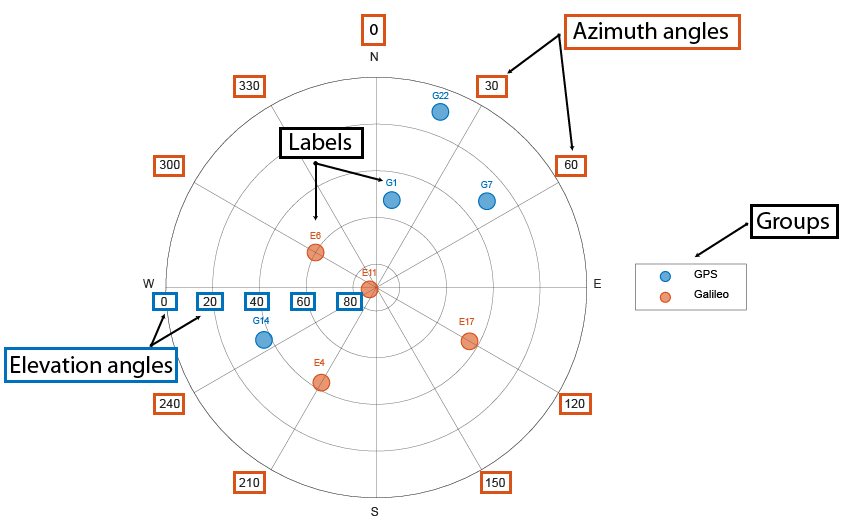
The main elements of the figure are:
Azimuth axes — Specified by the
azdatainput argument, azimuth angle positions are measured clockwise-positive from the North direction and are in the range [0, 360].Elevation axes —Specified by the
eldatainput argument, elevation angle positions are measured from the horizon line with 90 degrees being directly up and are in the range [0, 90].Labels — Specified by the
labeldatainput argument as a string array with an element for each point in theazdataandeldatavectors.Groups — Specified by the
GroupData(Navigation Toolbox) property, acategoricalarray defines the group for each satellite position.
Version History
Introduced in R2021aSee Also
Functions
Properties
- SkyPlotChart Properties (Navigation Toolbox)
Objects
gnssSensor(Navigation Toolbox) |nmeaParser(Navigation Toolbox)