轮胎和车辆
使用 Simscape™ Driveline™ Tires and Vehicles 库中的模块,可在各种可变环境条件下测试传动系统模型的响应。您还可以通过指定轮胎的柔性、惯量和滚动阻力以及车身的重心和正面面积等属性来提高模型的保真度。
函数
sdlUtility.tirread | Import TIR file to Tire (Magic Formula) block (自 R2022b 起) |
App
| 纵向车辆性能设计 | Design performance specifications for the Longitudinal Vehicle block (自 R2025a 起) |
Simscape 模块
主题
- Rotational-Translational Couplings
Couple rotational and translational dynamics.
- Complete Vehicle Model
Explore a model that includes an engine, a transmission, and drivetrain-wheel-road coupling.
- Control Vehicle Throttle Input Using a Powertrain Blockset Driver
Control a Simscape Driveline vehicle using a Powertrain Blockset™ driver.
- Model a Road Profile with Varying Elevation and Friction
Adjust surface grade and frictional properties using a Simscape Driveline Road Profile block.
精选示例
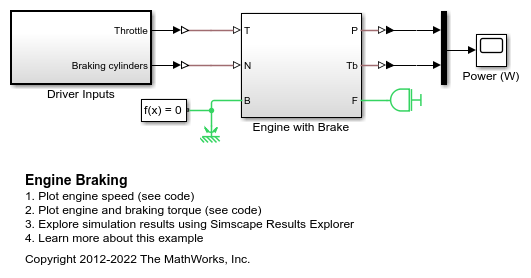
Engine Braking
A diesel engine equipped with a Jake Brake (R) or compression release engine brake. This type of brake is activated by the driver to slow the vehicle without relying on friction braking mechanisms. Air is released from a number of cylinders at the end of their compression strokes. In this example, the driver can dynamically select to activate braking on zero to eight cylinders. The braking torque for each cylinder is set using a lookup table with engine speed as the input.

Four-Wheel Drive Testbed
A four-wheel drive vehicle with open and limited slip differentials. The front and rear differentials can be standard or Type I Torsen. The center differential can be a solid shaft, viscous coupling, viscous coupling with a locking clutch, or open with no torque transfer. The differential options are in variant subsystems. The variants can be selected using the hyperlinks embedded in the model.
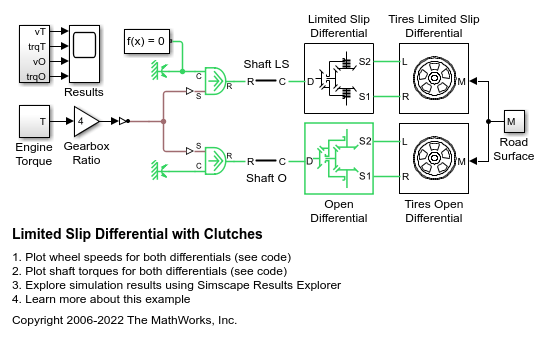
Limited Slip Differential with Clutches
A comparison between the behavior of an open differential and a limited slip differential with clutch packs. The limited slip differential is modeled using components from the Gears library and Clutches library in Simscape™ Driveline™. Wheel slip is limited by clutches that engage when the torque applied to the input of the differential exceeds a threshold. The clutches lock the differential so that the output shafts of the differential spin at the same speed.
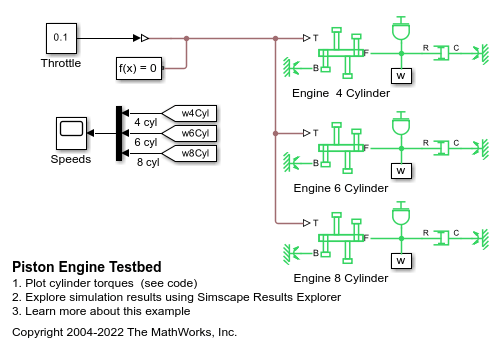
Piston Engine Testbed
The effect of varying the number of cylinders in a piston engine. Four, six, and eight cylinder engines are included with firing offsets evenly distributed about their four-stroke cycles. Piston pressures are normalized by the number of cylinders to emphasize the effect on output vibration.
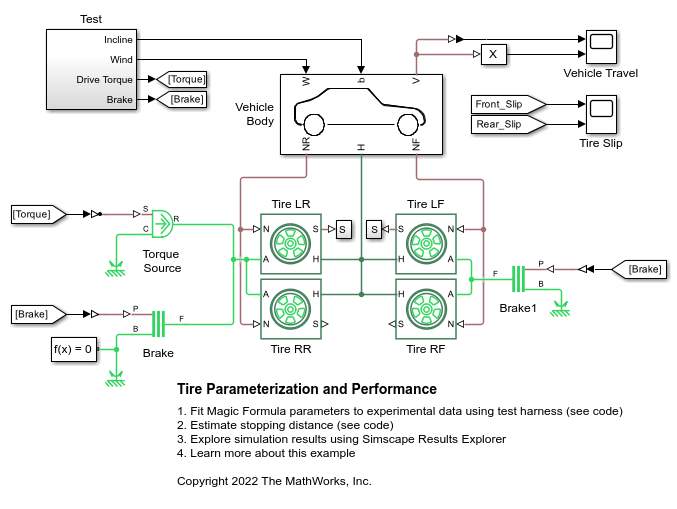
Tire Parameterization and Performance
Use Simscape™ Driveline™ to fit tire Magic Formula coefficients to experimental data and to measure the simulated stopping distance of a vehicle supported by the tires. The example uses the sdlUtility.tirread function to load initial tire parameters from a .TIR file. Then, the example uses the MATLAB® optimization function fminsearch with a test harness model to fit the tire coefficients to the experimental data. Other products available for performing this type of parameter fitting with Simscape Driveline models are the Optimization Toolbox™ and Simulink® Design Optimization™. These products provide predefined functions to manipulate and analyze blocks using GUIs or a command line approach. This example uses Fast Restart to quickly simulate tire response for different parameters during the optimization.

Torsen Differential
A comparison between the behavior of an open differential and a Torsen limited slip differential. The Torsen differential is modeled using components from the Gears library in Simscape™ Driveline™. Slip is limited in the Torsen differential because it uses non-backdrivable worm gears, which are modeled by Sun-Planet Worm Gear components. The result is higher torque applied to the wheel with greater traction, and identical speeds for the left and right axles.

Two Mode Hybrid Transmission
The basic architecture of a two mode hybrid transmission. It consists of three planetary gear sets and four clutches. This combination permits four fixed gear ratios plus two power-split modes. The power split modes are used to transition between fixed gear ratios and for heavy acceleration/deceleration. The fixed ratios help with efficiency when cruising. For the first power split (input-split regime), only Clutch 1 is engaged. For the second power split (compound-split regime), only Clutch 2 is engaged. Engaging two clutches simultaneously removes one degree of freedom and hence results in a fixed ratio.
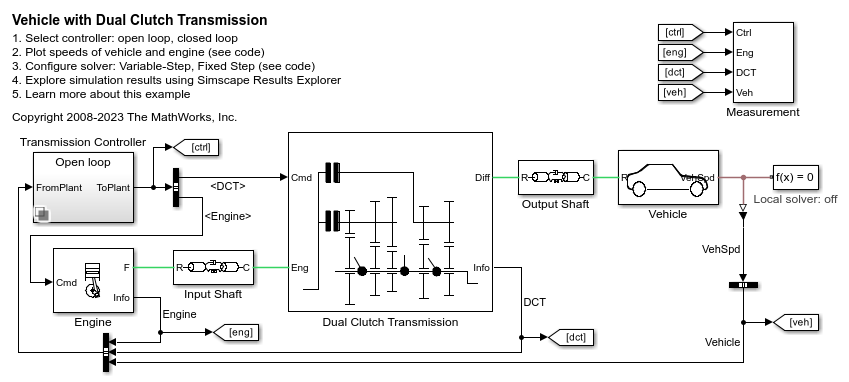
Vehicle with Dual Clutch Transmission
A vehicle with a five-speed dual-clutch transmission. Gear shifts are implemented via the two clutches, one clutch pressure being ramped up as the other clutch pressure is ramped down. Gear pre-selection via dog clutches ensures that the correct gear is fully selected before the on-going clutch is enabled.
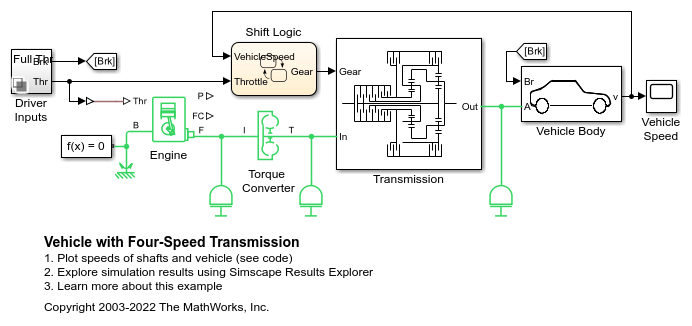
Vehicle with Four-Speed Transmission
A complete vehicle with Simscape™ Driveline™ components, including the engine, drivetrain, four-speed transmission, tires, and longitudinal vehicle dynamics. The transmission controller is implemented as a state machine in Stateflow®, selecting the gear based on throttle and vehicle speed.

Vehicle with Four-Wheel Drive
A four-wheel drive vehicle starting from rest and ascending a 15 degree incline. Initially the vehicle rolls backward until the engine develops sufficient torque to counter the slope. The tire compliance dynamics can be seen as the vehicle starts to accelerate. The model variant chosen for all of the tires can be set to the Simple, Friction Parameterized, or Magic Formula tire model using the hyperlinks in the model.

Vehicle with Manual Transmission
A vehicle that has a four-speed manual transmission. The key elements of the transmission are four synchronizers. By engaging or disengaging these synchronizers and associated dog clutches, the transmission provides four ratios 3.581, 2.022, 1.384, and 1, respectively. The synchronizers are modeled using the Cone Clutch and Dog Clutch blocks.
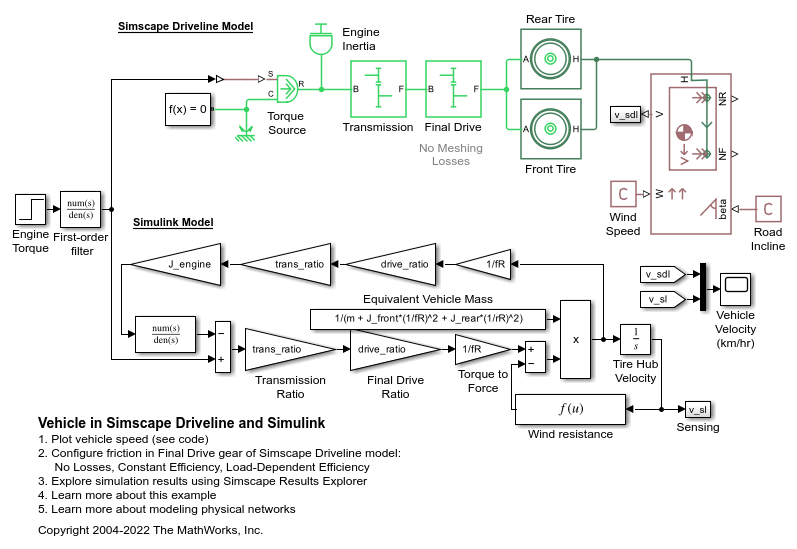
Vehicle in Simscape Driveline and Simulink
Two equivalent simplified vehicles modeled in Simscape™ Driveline™ and Simulink®. The simulation results are identical, and the Simscape Driveline model is easily extensible to include different effects and a higher level of modeling fidelity. Meshing losses in the gears and more detailed tire modeling can be added without introducing algebraic loops.