armcov
Autoregressive all-pole model parameters — modified covariance method
Description
Examples
Use a vector of polynomial coefficients to generate an AR(4) process by filtering 1024 samples of white noise. Reset the random number generator for reproducible results. Use the modified covariance method to estimate the coefficients.
rng default
A = [1 -2.7607 3.8106 -2.6535 0.9238];
y = filter(1,A,0.2*randn(1024,1));
arcoeffs = armcov(y,4)arcoeffs = 1×5
1.0000 -2.7741 3.8404 -2.6841 0.9360
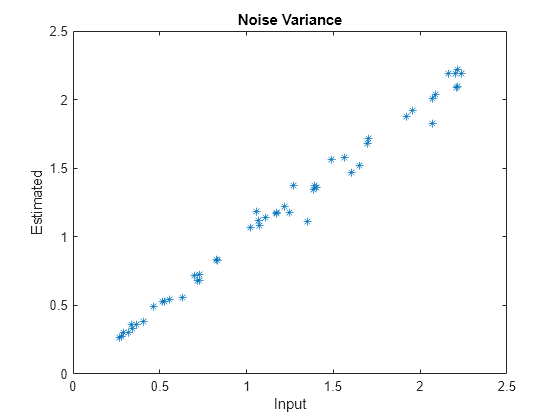
Generate 50 realizations of the process, changing each time the variance of the input noise. Compare the modified-covariance-estimated variances to the actual values.
nrealiz = 50; noisestdz = rand(1,nrealiz)+0.5; randnoise = randn(1024,nrealiz); noisevar = zeros(1,nrealiz); for k = 1:nrealiz y = filter(1,A,noisestdz(k) * randnoise(:,k)); [arcoeffs,noisevar(k)] = armcov(y,4); end plot(noisestdz.^2,noisevar,'*') title('Noise Variance') xlabel('Input') ylabel('Estimated')
Repeat the procedure using the function's multichannel syntax.
Y = filter(1,A,noisestdz.*randnoise); [coeffs,variances] = armcov(Y,4); hold on plot(noisestdz.^2,variances,'o') hold off legend('Single channel loop','Multichannel','Location',"best")

Input Arguments
Output Arguments
More About
Extended Capabilities
Version History
Introduced before R2006a