建模
准备 Simulink® 模型以进行硬件连接,添加模块以支持硬件协议,提供各种应用情形的参考示例。
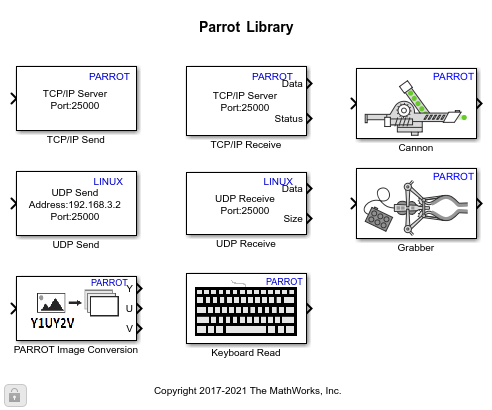
模块
| TCP/IP Receive | Receive data over TCP/IP network from remote host |
| TCP/IP Send | Send data over TCP/IP network to remote host |
| UDP Receive | Receive UDP message from UDP host |
| UDP Send | Send UDP message to UDP host |
| PARROT Image Conversion | Convert the encoded Y1UY2V image format to YUV or RGB format |
| Keyboard Read | Receive key presses from keyboard of host computer and output ASCII code |
| Grabber | Control the Grabber module connected to a Parrot Mambo minidrone |
| Cannon | Control the Cannon module connected to a Parrot Mambo minidrone |
主题
模型配置参数
- Model Configuration Parameters for Parrot Minidrone
Parameter and configuration options for creating and running applications on Parrot® minidrone.
Simulink Support Package for Parrot Minidrones 快速入门
- Getting Started with Minidrone Basics Using Virtual Lab Modules
Build your skills for controlling minidrones using four virtual lab modules based on MathWorks Minidrone Competitions. - Spin the Motors of a Parrot Minidrone Without Flying the Drone
This example shows you how to use Simulink® Support Package for Parrot® Minidrones to run a Simulink model that spins the propellers connected to motors of a Parrot minidrone, without flying the drone. - Controlling Motor Speed of a Parrot Minidrone During Runtime Using External Mode
This example shows you how to use the External mode feature in Simulink® for speed control of motors on a Parrot® minidrone during runtime. - Communicating with a Parrot Minidrone Using TCP/IP and UDP
This example shows how to use the TCP/IP and UDP communication blocks in the Simulink® Support Package for Parrot® Minidrones. - Getting Started with Image Processing Algorithms for Parrot Minidrones
This example shows you how to create a Simulink® model that uses the images from a Parrot® minidrone's downward-facing camera to develop a simple image-processing algorithm to be deployed on Parrot minidrone. - Getting Started with Keyboard Control of Parrot Minidrones
This example shows you how to create a Simulink® model that uses the keyboard of the host computer to control the motors of a Parrot® minidrone. - Getting Started with Cannon Block for Parrot Minidrone
This example shows how to use the Cannon block in Simulink® Support Package for Parrot® Minidrones to control a Cannon module attached to a Parrot Mambo minidrone. - Getting Started with Grabber Block for Parrot Minidrone
This example shows how to use the Grabber block in Simulink® Support Package for Parrot® Minidrones to control a Grabber module attached to a Parrot Mambo minidrone.
悬停 Parrot 迷你无人机
- Fly a Parrot Minidrone Using Hover Parrot Minidrone Simulink Template
Use the Hover Simulink model to fly Parrot minidrone.
实时图像处理
- Fly a Parrot Minidrone and Detect Objects
This example shows how to create a Simulink® model that starts the flight of a Parrot® minidrone and detects a blue-colored object on the ground using the drone's downward-facing camera. - Competition Track Builder
Use Track Builder app to create or modify tracks.
使用 Waypoint Follower、Orbit Follower 和键盘控制进行路径规划
- Fly a Parrot Minidrone and Detect Objects
This example shows how to create a Simulink® model that starts the flight of a Parrot® minidrone and detects a blue-colored object on the ground using the drone's downward-facing camera. - Follow Set of Waypoints Using Parrot Minidrone
This example shows how to fly a Parrot® minidrone using Simulink® Support Package for Parrot Minidrones by configuring the path planning algorithm to follow a set of waypoints. - Follow Orbit Using Parrot Minidrone
This example shows how to fly a Parrot® minidrone using Simulink® Support Package for Parrot Minidrones by configuring the path planning algorithm to follow an orbit path. - Path Planning Using Keyboard Control for Parrot Minidrone
This example shows how to use the keyboard of the host computer to control the position of Parrot® minidrone using Simulink® Support Package for Parrot Minidrones.
Simulink Online 在 Parrot Minidrones 中的应用
- Getting Started with Simulink Online for Parrot Minidrones
Getting started with Simulink Online™ and know the limitations - Working with Parrot Minidrones Projects in Simulink Online
Working with MATLAB® projects in Simulink Support Package for Parrot Minidrones
精选示例

Spin the Motors of a Parrot Minidrone Without Flying the Drone
Use Simulink® Support Package for Parrot® Minidrones to run a Simulink model that spins the propellers connected to motors of a Parrot minidrone, without flying the drone.
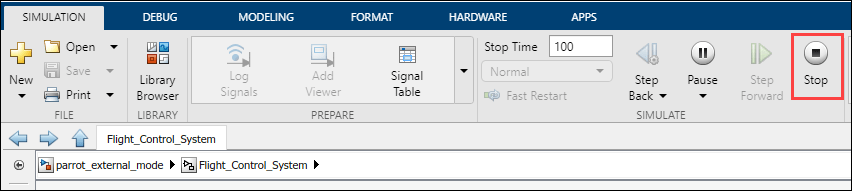
Controlling Motor Speed of a Parrot Minidrone During Runtime Using External Mode
Use the External mode feature in Simulink® for speed control of motors on a Parrot® minidrone during runtime.
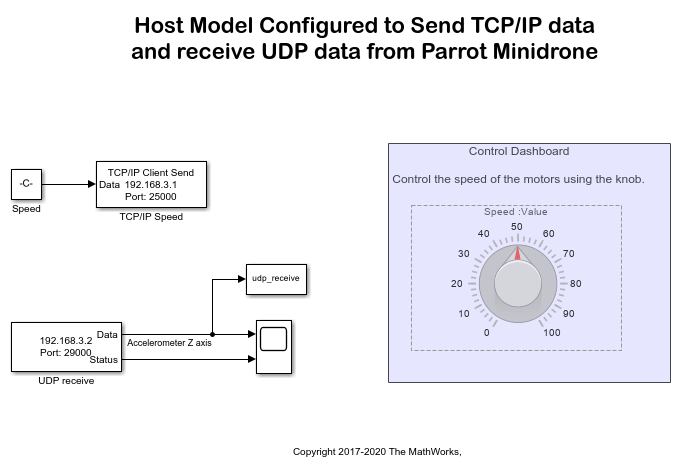
Communicating with a Parrot Minidrone Using TCP/IP and UDP
Use the TCP/IP and UDP communication blocks in the Simulink® Support Package for Parrot® Minidrones. The blocks are used to control the motor speed of the drone and visualize the accelerometer sensor data from the drone.
Getting Started with Image Processing Algorithms for Parrot Minidrones
Create a Simulink® model that uses the images from a Parrot® minidrone's downward-facing camera to develop a simple image-processing algorithm to be deployed on Parrot minidrone.
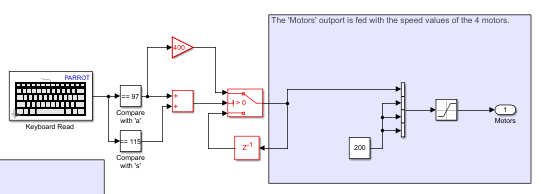
Getting Started with Keyboard Control of Parrot Minidrones
Create a Simulink® model that uses the keyboard of the host computer to control the motors of a Parrot® minidrone.
Fly a Parrot Minidrone and Detect Objects
Create a Simulink® model that starts the flight of a Parrot® minidrone and detects a blue-colored object on the ground using the drone's downward-facing camera.

Follow Set of Waypoints Using Parrot Minidrone
Fly a Parrot® minidrone using Simulink® Support Package for Parrot Minidrones by configuring the path planning algorithm to follow a set of waypoints.
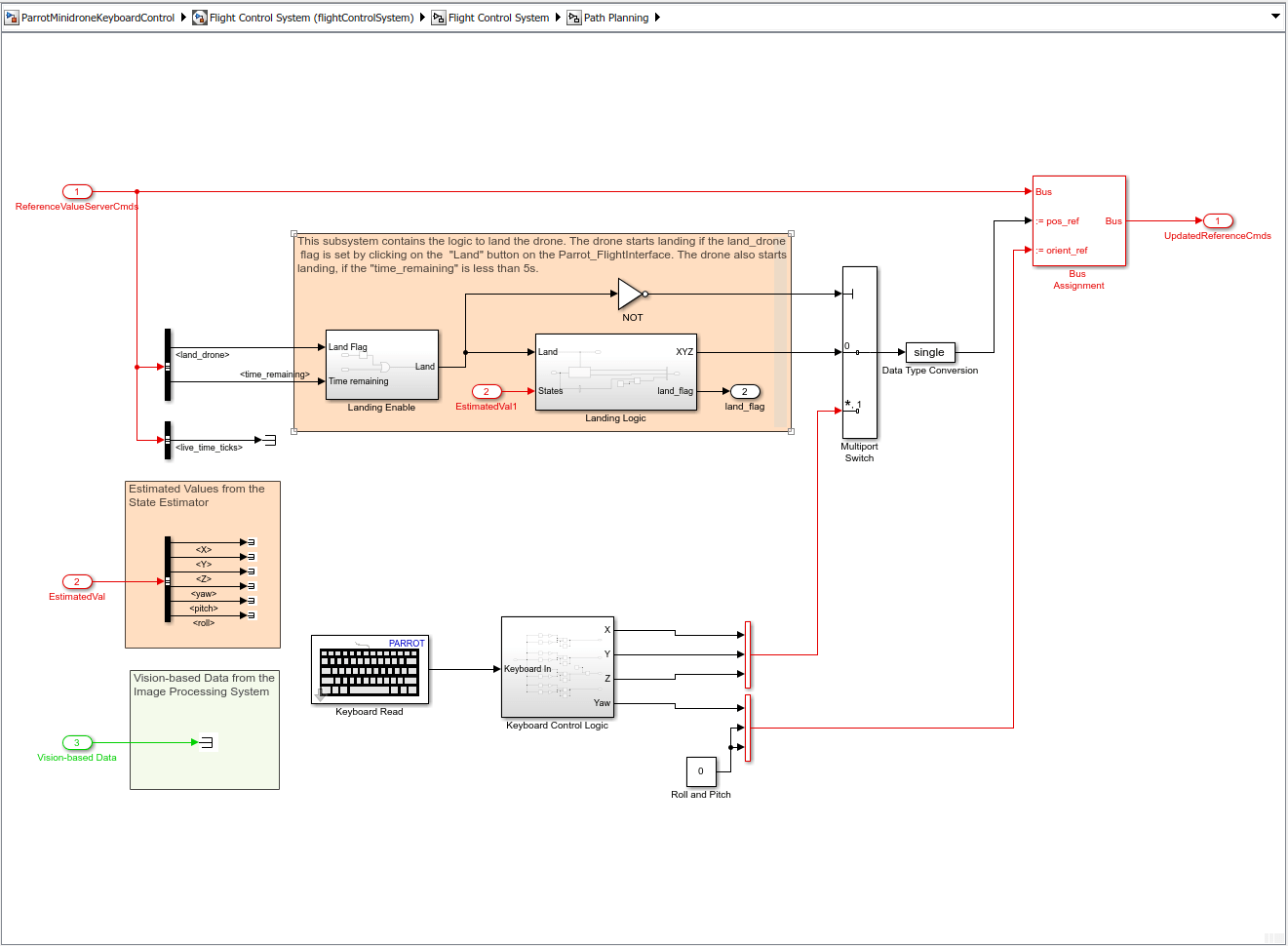
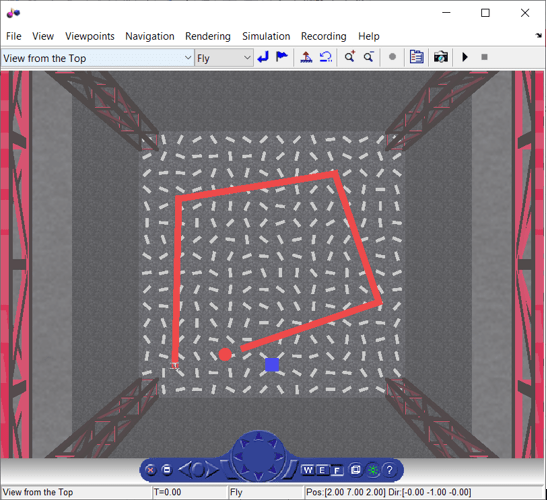
Path Planning Using Keyboard Control for Parrot Minidrone
Use the keyboard of the host computer to control the position of Parrot® minidrone using Simulink® Support Package for Parrot Minidrones.