Discrete State-Space
实现离散状态空间系统
库:
Simulink /
Discrete
Simulink /
Quick Insert /
Discrete
HDL Coder /
RCP and HIL
描述
Discrete State-Space 模块实现由以下方程所描述的系统:
其中 u 表示输入,x 表示状态,y 表示输出。矩阵系数必须具有这些特征,如下图所示:
A 必须是 n×n 矩阵,其中 n 是状态的数量。
B 必须是 n×m 矩阵,其中 m 是输入数目。
C 必须是 r×n 矩阵,其中 r 是输出数目。
D 必须是 r×m 矩阵。

此模块接受一个输入并生成一个输出。输入向量的宽度是 B 和 D 矩阵中的列数。输出向量的宽度是 C 和 D 矩阵中的行数。要定义初始状态向量,请使用初始条件参数。
要为 A、B、C、D 或初始条件指定全零向量或全零矩阵,请使用 zeros 函数。
空矩阵的模块行为
当矩阵 A、B 和 C 为空时(例如 []),模块的功能将变成 y(n) = Du(n)。如果初始条件向量也为空,模块将使用全零初始状态向量。
示例
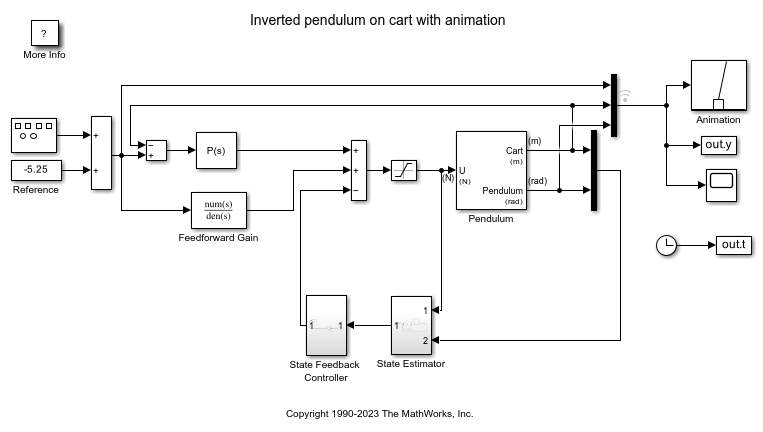
用动画演示倒立摆
此示例说明如何使用 Simulink® 对倒立摆系统建模进行动画演示。倒立摆的质心在枢轴点上方。为了稳定地保持此位置,当钟摆开始下落时,系统执行控制逻辑以将枢轴点移至质心下方。倒立摆是用于测试控制策略的经典动力学问题。
端口
输入
输出
参数
模块特性
数据类型 |
|
直接馈通 |
|
多维信号 |
|
可变大小信号 |
|
过零检测 |
|
扩展功能
版本历史记录
在 R2006a 之前推出
另请参阅
State-Space | Fixed-Point State-Space | 从 Simulink 模型生成 HDL 代码 (HDL Coder) | 基本 HDL 代码生成工作流 (HDL Coder)
主题
- 模型接口元素的 C 数据代码接口配置 (Simulink Coder)
- 使用 Struct 存储类将参数数据组织为结构体 (Embedded Coder)
- 数据对象