为多输入多输出被控对象设计 ADRC
此示例说明如何为多输入多输出 (MIMO) 被控对象设计自抗扰控制 (ADRC)。
概述
在此示例中,被控对象是一个中试规模精馏塔模型 [1]。该模型有两个输入:磁通流量 和蒸汽流量 。该模型有两个输出:轻产物纯度 和重产物纯度 。该模型还包含未知扰动。
定义被控对象传递函数。
s = tf('s');
G = [12.8/(16.7*s+1),-18.9/(21*s+1);6.6/(10.9*s+1),-19.4/(14.4*s+1)];控制器的目标是将输出保持为所需值 和 。要为被控对象设计两个 ADRC 控制器,您需要应用动态解耦控制方法 [1]。每个 ADRC 模块控制从输入 到输出 () 的通道。然后,您设计一个模型预测控制器 (MPC) 作为 ADRC 设计性能的基准控制器。
设计 ADRC 控制器
要设计解耦的 ADRC 控制器,请按如下方式逼近双输入双输出被控对象模型。
其中:
表示通道从输入 到输出 () 的总扰动,包括未知动态特性、跨通道干扰和外部扰动。
表示导数的阶数。
表示临界增益。
要确定导数的阶数 和临界增益 ,请在被控对象模型上执行阶跃输入试验。此示例提供了 DecoupledPlantIO 模型,用于对具有解耦输入和输出的模型进行仿真。
打开 Simulink® 模型。
mdl_step = "DecoupledPlantIO";
open_system(mdl_step)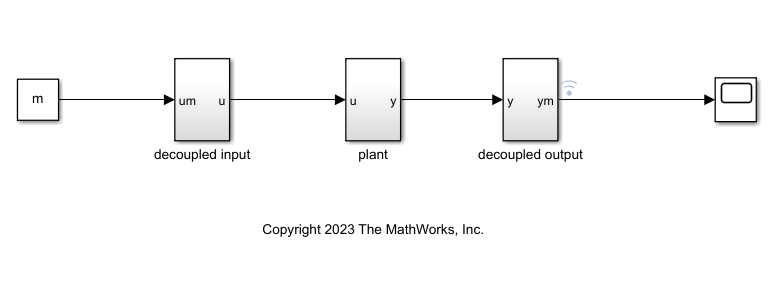
要执行从输入 到输出 的试验,请指定 m = 1。
对模型进行仿真并检查输出响应。
m = 1;
out = sim(mdl_step);
t1 = out.logsout{1}.Values.Time;
y1 = out.logsout{1}.Values.Data;
plot(t1,y1);
xlabel("time (s)")
ylabel("y1")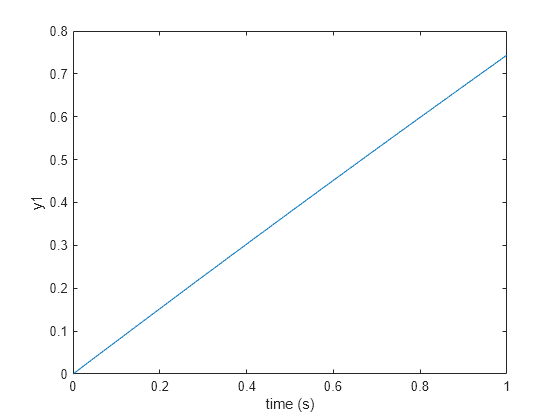
阶跃响应是一阶的,因此导数的阶数 。您可以使用斜率来逼近临界增益 。对于此响应,。
b1 = 0.75;
同样,为从输入 到输出 的试验指定 。
m = 2;
out = sim(mdl_step);
t2 = out.logsout{1}.Values.Time;
y2 = out.logsout{1}.Values.Data;
plot(t2,y2);
xlabel('time (s)')
ylabel('y2')
阶跃响应也是一阶的,因此 ,临界增益 。
b2 = -1.3;
调节 ADRC 控制器
要调节 ADRC 控制器的性能,请使用控制器带宽 和观测器带宽 参数。在此示例中,调节目标是与最佳 MPC 控制器的性能匹配。
为被控对象模型设计 MPC 控制器。
Ts = 1; % sample time
mpc1 = mpc(G,Ts);-->"PredictionHorizon" is empty. Assuming default 10. -->"ControlHorizon" is empty. Assuming default 2. -->"Weights.ManipulatedVariables" is empty. Assuming default 0.00000. -->"Weights.ManipulatedVariablesRate" is empty. Assuming default 0.10000. -->"Weights.OutputVariables" is empty. Assuming default 1.00000.
您可以调整控制器的权重以调节性能。有关详细信息,请参阅Tune Weights (Model Predictive Control Toolbox)。
指定 MPC 控制器的权重。
mpc1.Weights.ManipulatedVariablesRate = 0.7389*[1,1]; mpc1.Weights.OutputVariables = 0.1353*[1,1];
为了与 MPC 控制器的响应匹配,您必须设置 ADRC 控制器的控制器带宽和观测器带宽。对于此示例, 和 与 MPC 控制器的响应匹配。
wc = 0.25; wo = 3;
运行模型 45 秒。
T = 45;
mdl = "ADRCWithBenchmarkMIMO";
open_system(mdl);
sim(mdl);
-->Converting the "Model.Plant" property to state-space. -->Converting model to discrete time. -->Assuming output disturbance added to measured output #1 is integrated white noise. -->Assuming output disturbance added to measured output #2 is integrated white noise.
使用示波器查看被控对象的输出。
open_system(mdl + "/outputs")
MPC 控制器和 ADRC 控制器对输出 的响应相似。与 MPC 控制器相比,ADRC 控制器对输出 的跟踪误差更小。
抗扰
该模型具有 50 到 100 秒的外部扰动。将模型运行到 150 秒。
T = 150; sim(mdl);
使用示波器查看被控对象的输出。
open_system(mdl + "/outputs")
对于此示例,与基准 MPC 控制器相比,ADRC 控制器具有更出色的抗扰结果。由于 ADRC 控制器使用幅值更大的控制输入,因此在存在扰动的情况下,输出会更快地收敛到参考值。使用示波器查看被控对象的输入。
open_system(mdl + "/inputs")
参考资料
[1] Zheng, Qing, Zhongzhou Chen, and Zhiqiang Gao.“A Dynamic Decoupling Control Approach and Its Applications to Chemical Processes.”In 2007 American Control Conference, 5176–81, 2007. https://doi.org/10.1109/ACC.2007.4282973.
另请参阅
Active Disturbance Rejection Control