transformTree
Define coordinate frames and relative transformations
Description
The transformTree object contains an organized tree structure for
coordinate frames and their relative transformations over time. The object stores the relative
transformations between children frames and their parents. You can specify a timestamped
transform for frames and query the relative transformations between different frames in the
tree. The object interpolates intermediate timestamps using a constant velocity assumption for
linear motion, and spherical linear interpolation (SLERP) for angular motion. Otherwise, the
relative transformations are kept constant past the range of the timestamps specified. Times
prior to the first timestamp return NaN.
Use the updateTransform function to
add timestamps to the tree by defining the parent-to-child relationships. Query specific
transformations at given timestamps using getTransform and display
the frame relationships using show.
Creation
Syntax
Description
frames = transformTree"root", with
the maximum number of frames and timestamped transforms per frame, set to 10.
frames = transformTree(rootName,maxNumFrames)
frames = transformTree(rootName,maxNumFrames,maxNumTransforms)
Input Arguments
Properties
Object Functions
copy | Copy transform tree |
getGraph | Graph object representing tree structure |
getTransform | Get relative transform between frames |
info | List all frame names and stored timestamps |
removeTransform | Remove frame transform relative to its parent |
show | Show transform tree |
updateTransform | Update frame transform relative to its parent |
Examples
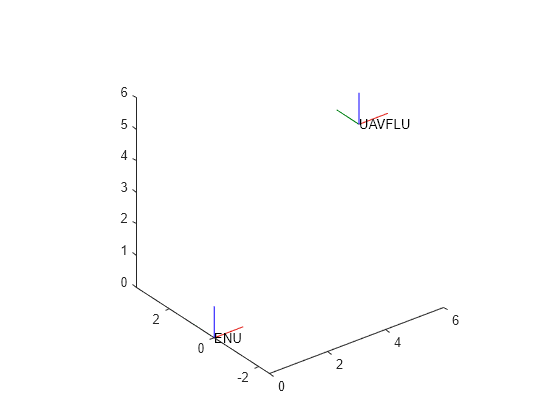
Set East-North-Up coordinate frame as the root frame in the scenario.
tree = transformTree("ENU");Create a front-left-up UAV body frame by transforming the root frame. Set the UAV body frame to have initial position of 5 meters east, 5 meters up, and no rotation relative to the root frame.
updateTransform(tree,"ENU","UAVFLU",[5 0 5],[1 0 0 0],0)
Show the root and UAV body frame.
figure show(tree);
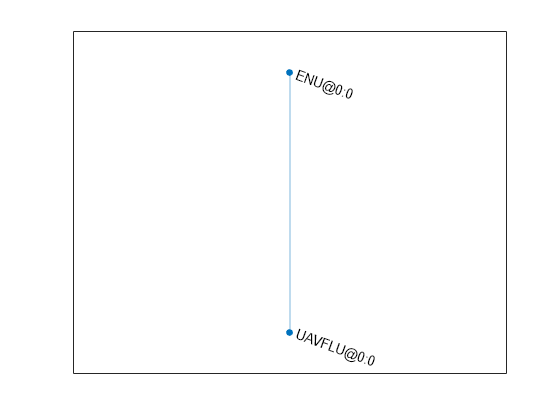
Show the transformation tree. The transformation tree shows that the UAV body frame is a child of the root frame.
plot(getGraph(tree))
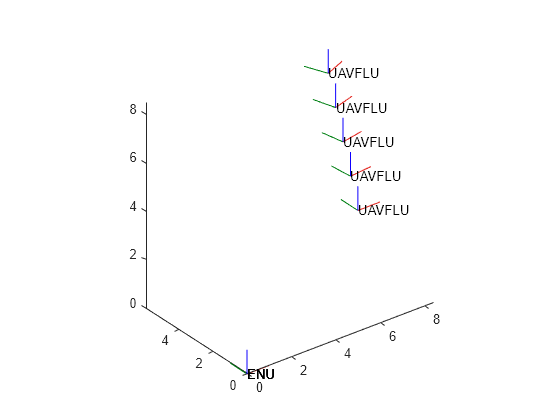
Move the UAV frame to a new position and orientation for a duration of 10 seconds.
updateTransform(tree,"ENU","UAVFLU",[10 10 10],eul2quat([pi/4 0 0]),10)
Show the UAV frame at 1 second increments. At each time step, the show function performs interpolation using a constant velocity assumption for linear motion, and spherical linear interpolation (SLERP) for angular motion.
ts = linspace(0,5,5); for idx = 1:5 show(tree, ts(idx)); hold on end
Obtain the transform between the root frame and the final UAV body frame.
getTransform(tree,"ENU","UAVFLU",5)
ans = 4×4
0.9239 -0.3827 0 7.5000
0.3827 0.9239 0 5.0000
0 0 1.0000 7.5000
0 0 0 1.0000
Version History
Introduced in R2020b