show3D
Visualize UAV scenario in 3-D
Syntax
Description
[
visualizes latest states of the platforms and sensors in the UAV scenario
ax,plottedFrames] = show3D(scene)scene along with all static meshes. The function also returns the
axes on which the scene is plotted and the frames on which each object is plotted.
[
visualizes the UAV scenario at the specified ax,plottedFrames] = show3D(scene,time)time.
[
specifies additional options using Name-Value pairs. Enclose each ax,plottedFrames] = show3D(___,Name,Value)Name
in quotes.
Examples
Create a UAV scenario, and specify the update rate, stop time, and reference location.
scene = uavScenario(UpdateRate=200,StopTime=2,ReferenceLocation=[46, 42, 0]);
Add an inertial frame MAP to the scenario.
addInertialFrame(scene,"ENU","MAP",trvec2tform([1 0 0]));
Add one ground mesh and two cylindrical obstacle meshes to the scenario.
addMesh(scene,"Polygon",{[-100 0; 100 0; 100 100; -100 100],[-5 0]},[0.3 0.3 0.3]); addMesh(scene,"Cylinder",{[20 10 10],[0 30]},[0 1 0]); addMesh(scene,"Cylinder",{[46 42 5],[0 20]},[0 1 0],UseLatLon=true);
Add a UAV platform with a specified waypoint trajectory to the scenario.
traj = waypointTrajectory(Waypoints=[0 -20 -5; 20 -20 -5; 20 0 -5],TimeOfArrival=[0 1 2]);
uavPlat = uavPlatform("UAV",scene,Trajectory=traj); Add a mesh to the UAV platform.
updateMesh(uavPlat,"quadrotor",{4},[1 0 0],eul2tform([0 0 pi])); addGeoFence(uavPlat,"Polygon",{[-50 0;50 0;50 50;-50 50],[0 100]},true,ReferenceFrame="ENU");
Attach an INS sensor to the UAV platform.
insModel = insSensor;
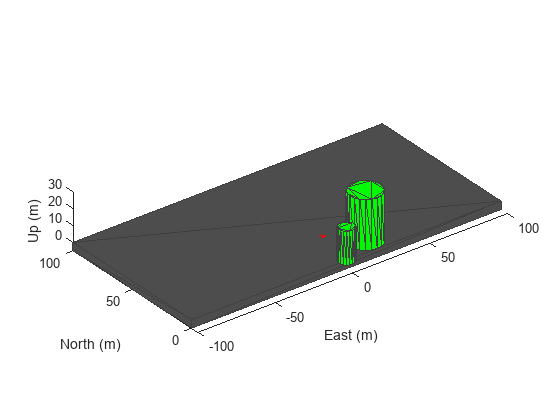
ins = uavSensor("INS",uavPlat,insModel,MountingLocation=[4 0 0]); Visualize the scenario in 3D.
ax = show3D(scene);
axis(ax,"equal"); Set up and start the scenario.
% Set up scenario setup(scene); % Start scenario while advance(scene) % Update sensor readings updateSensors(scene); % Visualize the scenario show3D(scene,"Parent",ax,"FastUpdate",true); drawnow limitrate end
Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2020b