Deep Learning Object Detector
库:
Computer Vision Toolbox /
Analysis & Enhancement
描述
Deep Learning Object Detector 模块使用通过模块参数指定的经过训练的目标检测器来预测输入图像的边界框、类标签和分数。此模块允许从 MAT 文件或使用 MATLAB® 函数将预训练目标检测器加载到 Simulink® 模型中。此模块为使用 Simulink 中的检测器对象提供图形界面。要启用 Deep Learning Object Detector 模块的某些参数,您必须选择支持这些参数的目标检测器。例如,将 yolov2ObjectDetector 对象与此模块结合使用,您可以选择与关联的 detect 对象函数的名称-值参量类似的参数。
示例
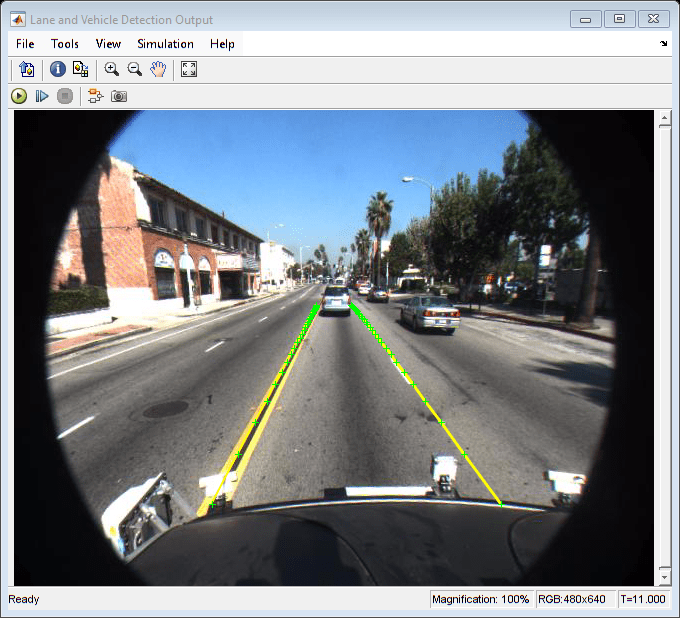
Lane and Vehicle Detection in Simulink Using Deep Learning
Use deep convolutional neural networks inside a Simulink® model to perform lane and vehicle detection. This example takes the frames from a traffic video as an input, outputs two lane boundaries that correspond to the left and right lanes of the ego vehicle, and detects vehicles in the frame.
端口
输入
输出
在输入图像中检测到的目标的位置,以 M×4 或 M×5 矩阵形式返回。M 是在图像中检测到的边界框的数量。您可以通过指定最大检测次数参数来设置 M 大小的上界。
下表描述边界框的格式。
| 边界框 | Description |
|---|---|
与轴对齐的矩形 | 在空间坐标中定义为 M×4 数值矩阵,其行的形式为 [x y w h],其中:
|
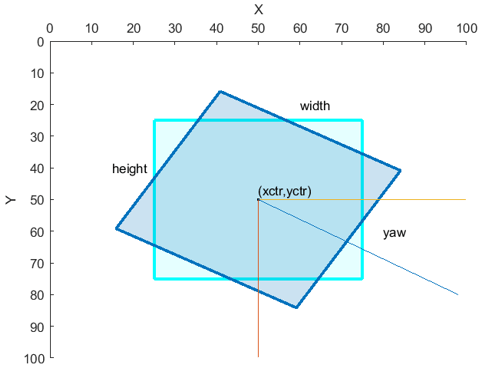
旋转矩形 | 在空间坐标中定义为 M×5 数值矩阵,其行的形式为 [xctr yctr w h yaw],其中:
|
有关详细信息,请参阅Datastores for Deep Learning (Deep Learning Toolbox)。
边界框的标签,以 M×1 枚举向量形式返回。M 是在图像中检测到的边界框的数量。
每个标签的检测置信度分数,以 M×1 向量形式返回。M 是在图像中检测到的边界框的数量。分数越高,表示检测的置信度越高。