detect
Detect objects using YOLO v2 object detector
Syntax
Description
bboxes = detect(detector,I)I, using
you only look once version 2 (YOLO v2) object detector. The input size of the image must
be greater than or equal to the network input size of the pretrained detector. The
locations of objects detected are returned as a set of bounding boxes.
Note
The use of a CUDA®-enabled NVIDIA® GPU is highly recommended. The GPU reduces computation time significantly. Usage of the GPU requires Parallel Computing Toolbox™. For information about the supported compute capabilities, see GPU Computing Requirements (Parallel Computing Toolbox).
[___,
returns a categorical array of labels assigned to the bounding boxes in addition to the
output arguments from the previous syntax. The labels used for object classes are defined
during training using the labels] = detect(detector,I)trainYOLOv2ObjectDetector function.
detectionResults = detect(detector,ds)read function
of the input datastore.
[___] = detect(___,
detects objects within the rectangular search region specified by
roi)roi. Use output arguments from any of the previous syntaxes. Specify
input arguments from any of the previous syntaxes.
[___] = detect(___,
specifies options using one or more name-value arguments in addition to any combination of
arguments from previous syntaxes. For example, Name=Value)Threshold=0.75 sets the
threshold to remove detections to 0.75.
Examples
Load a YOLO v2 object detector pretrained to detect vehicles.
vehicleDetector = load('yolov2VehicleDetector.mat','detector'); detector = vehicleDetector.detector;
Read a test image into the workspace.
I = imread('highway.png');Display the input test image.
imshow(I);
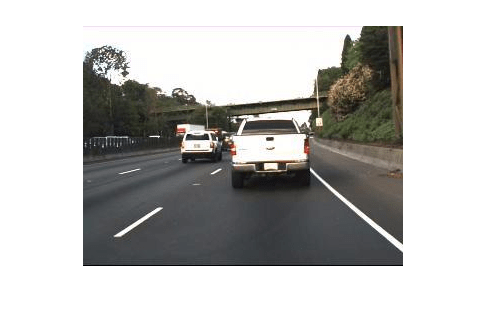
Run the pretrained YOLO v2 object detector on the test image. Inspect the results for vehicle detection. The labels are derived from the ClassNames property of the detector.
[bboxes,scores,labels] = detect(detector,I)
bboxes = 1×4
78 81 64 63
scores = single
0.6224
labels = categorical
vehicle
Annotate the image with the bounding boxes for the detections.
if ~isempty(bboxes) detectedI = insertObjectAnnotation(I,'rectangle',bboxes,cellstr(labels)); end figure imshow(detectedI)

Input Arguments
Name-Value Arguments
Output Arguments
More About
Extended Capabilities
Version History
Introduced in R2019aSee Also
Apps
Functions
Objects
Topics
- Create Custom YOLO v2 Object Detection Network
- Object Detection Using YOLO v2 Deep Learning
- Multiclass Object Detection Using YOLO v2 Deep Learning
- Estimate Anchor Boxes from Training Data
- Code Generation for Object Detection by Using YOLO v2
- Getting Started with YOLO v2
- Get Started with Object Detection Using Deep Learning
- Choose an Object Detector
- Anchor Boxes for Object Detection
- Datastores for Deep Learning (Deep Learning Toolbox)