跟踪和运动估计
运动估计和跟踪是活动识别、交通监控、汽车安全和监督等许多计算机视觉应用中的关键活动。
Computer Vision Toolbox™ 提供视频跟踪算法,如连续自适应均值漂移 (CAMShift) 和 Kanade-Lucas-Tomasi (KLT)。您可以使用这些算法来跟踪单个目标,也可将其用作更复杂的跟踪系统中的构建块。该工具箱还提供一个多目标跟踪框架,其中包括卡尔曼滤波器,以及将目标检测分配到跟踪的匈牙利算法。
运动估计是确定块在相邻视频帧之间的运动的过程。此工具箱包括运动估计算法,如光流、块匹配和模板匹配。这些算法用于创建运动向量,这些运动向量可与整个图像、块、任意补片或单个像素相关。对于块和模板匹配,寻找最佳匹配项的评估度量包括均方误差 (MSE)、均值绝对偏差 (MAD)、最大绝对差 (MaxAD)、绝对差之和 (SAD) 以及平方差之和 (SSD)。
函数
主题
- Multiple Object Tracking
Locate a moving object or multiple objects over time in a video stream.
精选示例
Motion-Based Multiple Object Tracking
Perform automatic detection and motion-based tracking of moving objects in a video from a stationary camera.
Multi-Object Tracking with DeepSORT
Integrate appearance features from a re-Identification (Re-ID) deep neural network with a multi-object tracker.
Visual Tracking of Occluded and Unresolved Objects
Resolve challenging tracking scenarios when objects are occluded or when they are in close proximity to each other.

Implement Simple Online and Realtime Tracking
Implement the Simple Online and Realtime (SORT) object tracking algorithm using the Computer Vision Toolbox and the Sensor Fusion and Tracking Toolbox™.
Automate Labeling of Objects in Video Using RAFT Optical Flow
Use a pretrained RAFT optical flow estimation network to propagate a predefined object mask from one frame to the next in a video sequence.
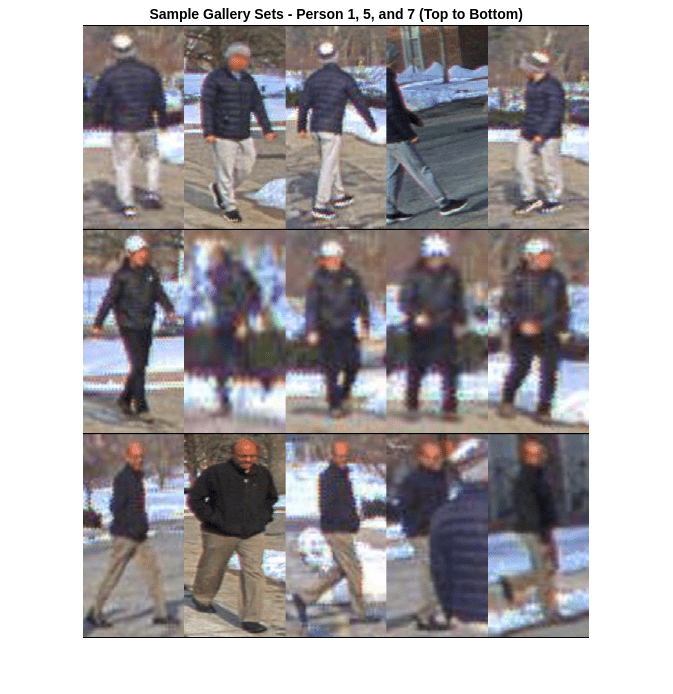
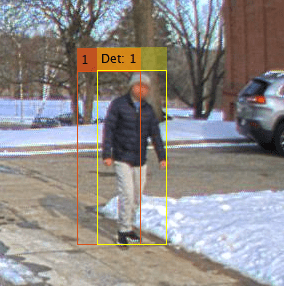
Reidentify People Throughout a Video Sequence Using ReID Network
Track people throughout a video sequence using re-identification with a residual network.
Automate Ground Truth Labeling for Object Tracking and Re-Identification
Create an automation algorithm to automatically label data for object tracking and for object re-identification.

Convert Ground Truth Labeling Data for Object Re-Identification
Convert a groundTruth object to the re-identification training data format.
Convert Ground Truth Labeling Data for Object Tracking
Convert a groundTruth object to the trackCLEARmetrics truth format.
Tracking Pedestrians from a Moving Car
Track pedestrians using a camera mounted in a moving car.
Track a Face in Scene
Track a face using a minimum Eigen features detection function and a point tracker.
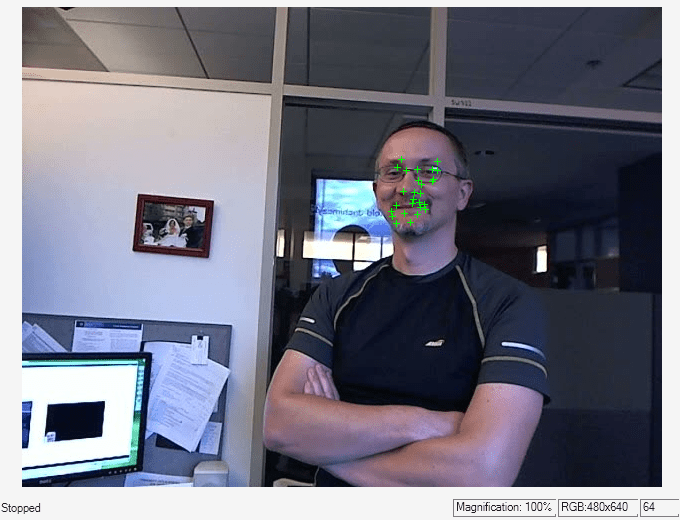
Face Detection and Tracking Using Live Video Acquisition
Automatically detect and track a face in a live video stream, using the KLT algorithm.
Face Detection and Tracking Using CAMShift
Automatically detect and track a face.
Face Detection and Tracking Using the KLT Algorithm
Automatically detect and track a face using feature points. The approach in this example keeps track of the face even when the person tilts his or her head, or moves toward or away from the camera.
Use Kalman Filter for Object Tracking
Use the vision.KalmanFilter object and configureKalmanFilter function to track objects.

Import Camera-Based Datasets in MOT Challenge Format for Object Tracking
Read camera image sequences and convert the ground truth and detections to Sensor Fusion and Tracking Toolbox formats using a custom dataset.
Multi-Object Tracking and Human Pose Estimation
Detect multiple people, track them, and estimate their body poses in a video by using pretrained deep learning networks and a global nearest-neighbor (GNN) assignment tracking approach.