Control Design for Robot Throwing Systems
From the series: Modeling, Simulation, and Control
Join Veer Alakshendra and Maitreyee Mordekar as they discuss the control strategy for targeting a ball at the target relevant to robotics competitions such as Robocon.
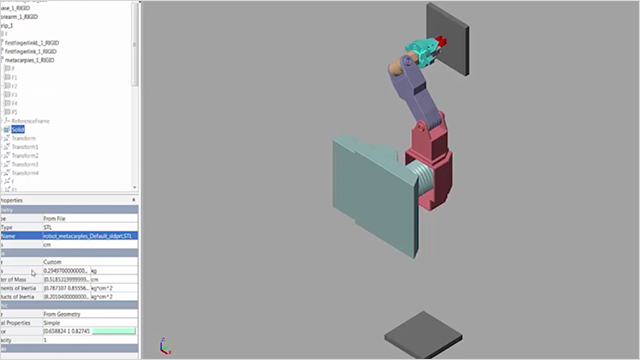
Veer and Maitreyee first show how you can extend Simscape Multibody™ throwing mechanism models with physical effects modeled in Simscape™. Then they build a closed-loop control system to produce the required amount of spool input for the desired piston movement. PID controller block has been used to control the system. Finally, Veer and Maitreyee show that with proper tuning of the PID tuner, the ball can successfully land in the yellow box.
You can find the example models used in this video on MATLAB Central File Exchange.
For more information, you can access the following resources:
Published: 21 Nov 2018