模型导入
要从 CAD、URDF 或 Robotics System Toolbox™ 模型创建 Simscape Multibody 模型,请使用 smimport 函数。该函数会解析模型,提取必要的数据,并使用 Simscape Multibody 模块针对实体、约束和关节重新构造装配体。
URDF 模型必须为 URDF 文件,Robotics System Toolbox 模型必须为 rigidBodyTree (Robotics System Toolbox) 对象,CAD 装配体必须采用合适的 XML 格式。要将 CAD 装配体转换为 XML 文件,您可以使用 smexportonshape 函数或 Simscape Multibody Link 插件。要转换 Onshape® CAD 装配体,请使用 smexportonshape。对于 Autodesk® Inventor®、PTC® Creo™ 或 SolidWorks® 模型,请使用 Simscape Multibody Link 插件。您还可以转换来自其他来源的模型。有关详细信息,请参阅 Simscape Multibody XML 架构。
函数
smexportonshape | Export a CAD assembly model from Onshape |
smimport | Import a CAD, URDF, or Robotics System Toolbox model |
主题
CAD 导入
- Install the Simscape Multibody Link Plugin
Download and install the Simscape Multibody Link plugin. - Convert CAD Assembly into Simscape Multibody Model
Workflows to convert a CAD assembly into a Simscape Multibody model. - Import a CAD Assembly Model
You import a CAD assembly model into Simscape™ Multibody™ software using thesmimportfunction. - Onshape Import
Overview of CAD import from Onshape software with emphasis on import workflow, tools, and user authentication.
URDF 导入
- Import a URDF Humanoid Model
Export a humanoid robot from Onshape software and import it into Simscape Multibody software. - URDF Primer
Learn about the URDF specification popular in the robotics community and create a simple URDF model for later import into the Simscape Multibody environment. - Import URDF Models
Importing a URDF model. Mapping URDF entities to Simscape Multibody blocks. A simple URDF import example.
精选示例

Four Bar Mechanism Imported from a CAD Assembly
Has been imported from a CAD assembly designed in SolidWorks® using the smimport command. The XML file "FourBar.xml" and the STL files obtained during export of the CAD assembly have been used to create this example.

Humanoid Robot
Has been imported from a URDF file using the smimport command. The URDF file "Humanoid.urdf" and the STEP files that visualize the robot parts were used to create this example. Motion actuation of the joints was manually added to the imported model to make the robot perform interesting movements.
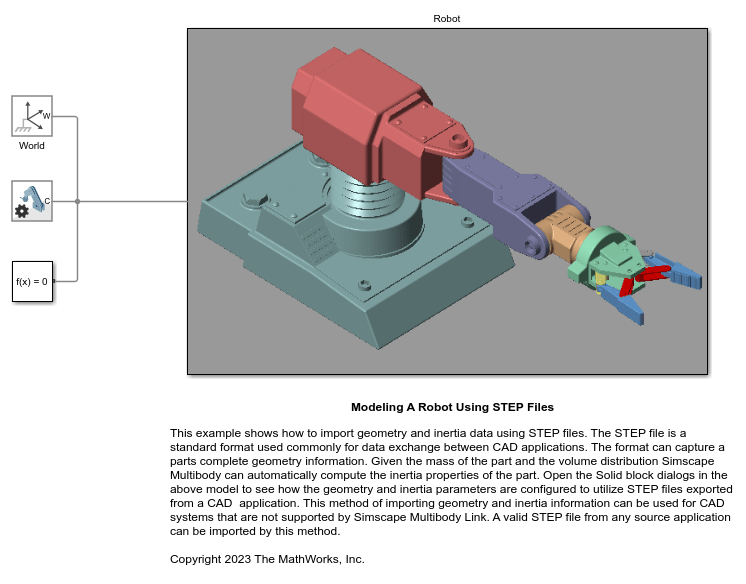
Modeling a Robot Using STEP Files
Import geometry and inertia data using STEP files. The STEP file is a standard format used commonly for data exchange between CAD applications. The format can capture the complete geometry information of a part. Given the mass of the part and the volume distribution, Simscape™ Multibody™ can automatically compute the inertia properties of the part. Open the Solid block dialog boxes in the above model to see how the geometry and inertia parameters are configured to utilize STEP files exported from another application (CAD for example). This method of importing geometry and inertia information can be used for CAD systems that are not supported by Simscape Multibody Link. A valid STEP file from any source application can be imported by this method.
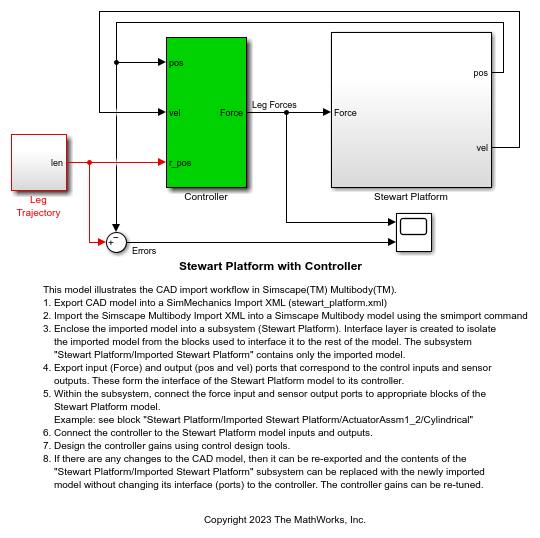
Stewart Platform with Controller
This model illustrates the CAD import workflow in Simscape™ Multibody™.