modalreal
Syntax
Description
[
returns a modal realization msys,blks] = modalreal(sys)msys of an LTI model
sys. This is a realization where A or
(A,E) are block diagonal and each block corresponds
to a real pole, a complex pair, or a cluster of repeated poles. blks is
a vector containing block sizes down the diagonal.
For sparse models, this syntax returns a truncated modal realization. By default, the function computes the first 1000 modes of smallest magnitude. (since R2026a)
[___] = modalreal(
returns the modal realization based on the options specified by one or more name-value
arguments. Use these options for controlling the block size and normalizing 2-by-2 blocks
associated with complex pairs.sys,Name=Value)
For sparse models, this syntax returns a truncated
modal realization based on the subset of computed poles. This subset is controlled by the
Focus and MaxOrder options. (since R2026a)
Examples
pendulumCartSSModel.mat contains the state-space model of an inverted pendulum on a cart where the outputs are the cart displacement and the pendulum angle . The control input u is the horizontal force on the cart.
First, load the state-space model sys to the workspace.
load('pendulumCartSSModel.mat','sys');
Convert sys to modal form and extract the block sizes.
[msys,blks,TL,TR] = modalreal(sys)
msys =
A =
x1 x2 x3 x4
x1 0 0 0 0
x2 0 -0.05 0 0
x3 0 0 -5.503 0
x4 0 0 0 5.453
B =
u1
x1 1.875
x2 6.298
x3 12.8
x4 12.05
C =
x1 x2 x3 x4
y1 16 -4.763 -0.003696 0.003652
y2 0 0.003969 -0.03663 0.03685
D =
u1
y1 0
y2 0
Continuous-time state-space model.
Model Properties
blks = 4×1
1
1
1
1
TL = 4×4
0.0625 1.2500 -0.0000 -0.1250
0 4.1986 0.0210 -0.4199
0 0.2285 -13.5873 2.4693
0 -0.2251 13.6287 2.4995
TR = 4×4
16.0000 -4.7631 -0.0037 0.0037
0 0.2381 0.0203 0.0199
0 0.0040 -0.0366 0.0369
0 -0.0002 0.2015 0.2009
msys is the modal realization of sys, blks represents the block sizes down the diagonal, and TL and TR represent the block-diagonalizing transformation matrices.
For this example, consider the following system with doubled poles and clusters of close poles:
Create a zpk model of this system and obtain a modal realization using the function modalreal.
sys = zpk([1 -1],[0 -10 -10.0001 1+1i 1-1i 1+1i 1-1i],100); [msys1,blks1] = modalreal(sys); blks1
blks1 = 3×1
1
4
2
msys1.A
ans = 7×7
0 0 0 0 0 0 0
0 1.0000 2.1220 0 0 0 0
0 -0.4713 1.0000 1.5296 0 0 0
0 0 0 1.0000 1.8439 0 0
0 0 0 -0.5423 1.0000 0 0
0 0 0 0 0 -10.0000 4.0571
0 0 0 0 0 0 -10.0001
msys1.B
ans = 7×1
0.1600
-0.0052
0.0201
-0.0975
0.2884
0
4.0095
sys has a pair of poles at s = -10 and s = -10.0001, and two complex poles of multiplicity 2 at s = 1+i and s = 1-i. As a result, the modal form msys1 is a state-space model with a block of size 2 for the two poles near s = -10, and a block of size 4 for the complex eigenvalues.
Now, separate the two poles near s = -10 by increasing the condition number of the block-diagonalizing transformation. Set SepTol to 1e-10 for this example.
[msys2,blks2] = modalreal(sys,SepTol=1e-10); blks2
blks2 = 4×1
1
4
1
1
msys2.A
ans = 7×7
0 0 0 0 0 0 0
0 1.0000 2.1220 0 0 0 0
0 -0.4713 1.0000 1.5296 0 0 0
0 0 0 1.0000 1.8439 0 0
0 0 0 -0.5423 1.0000 0 0
0 0 0 0 0 -10.0000 0
0 0 0 0 0 0 -10.0001
msys2.B
ans = 7×1
105 ×
0.0000
-0.0000
0.0000
-0.0000
0.0000
1.6267
1.6267
The A matrix of msys2 includes separate diagonal elements for the poles near s = -10. Increasing the condition number results in some very large values in the B matrix.
For this example, consider the following system with complex pair poles and clusters of close poles:
Create a zpk model of this system and obtain a modal realization using the function modalreal.
sys = zpk([1 -1],[0 -10 -10.0001 3+4i 3-4i],100); [msys1,blks1] = modalreal(sys); blks1
blks1 = 3×1
1
2
2
msys1.A
ans = 5×5
0 0 0 0 0
0 3.0000 8.7637 0 0
0 -1.8257 3.0000 0 0
0 0 0 -10.0000 8.8001
0 0 0 0 -10.0001
msys1 is a state-space model with a block of sizes 2 for the two poles near s = -10, and a pair of complex poles at s = 3+4i and s = 3-4i.
You can normalize the values of 2-by-2 blocks to show the actual pole values using the Normalize option. Additionally, relax the relative accuracy of the block diagonalizing transformation to separate the block near s = -10.
[msys2,blks2] = modalreal(sys,Normalize=true,SepTol=1e-10); blks2
blks2 = 4×1
1
2
1
1
msys2.A
ans = 5×5
0 0 0 0 0
0 3.0000 4.0000 0 0
0 -4.0000 3.0000 0 0
0 0 0 -10.0000 0
0 0 0 0 -10.0001
For complex poles, this option normalizes the 2-by-2 block of complex poles to .
Since R2026a
This example shows how to obtain a truncated modal realization for a sparse model using modalreal.
Load the sparse model.
load flowmeterSparse.mat
size(sys)Sparse state-space model with 5 outputs, 1 inputs, and 9669 states.
The sparse model contains 9669 states. By default, modalreal computes the first 1000 poles of smallest magnitude for sparse models, which may be time consuming. Computing the modal realization, you can see that modalreal returns a realization of size 1000.
[msys,blks,TL,TR] = modalreal(sys); size(msys)
State-space model with 5 outputs, 1 inputs, and 1000 states.
You can limit the subset of computed poles using the Focus and MaxOrder options. For example, compute the modal realization in the frequency range 0 rad/s to 250 rad/s.
[msys2,blks2,TL2,TR2] = modalreal(sys,Focus=[0 250]); size(msys2)
State-space model with 5 outputs, 1 inputs, and 33 states.
Compare the frequency response of the truncated realizations with the original sparse model.
sigmaplot(sys,msys,".-",msys2,"--",w) legend("Original model","Truncated realization (1000 modes)",... "Truncated realization (33 modes)")
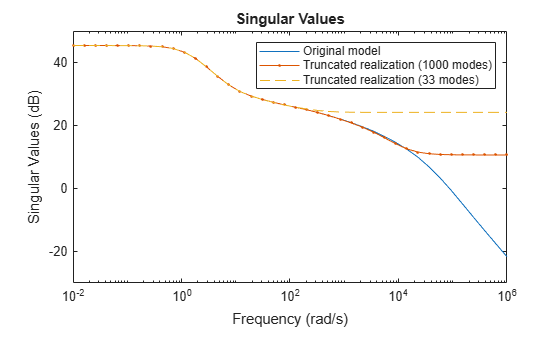
Use this workflow to quickly obtain a truncated modal realization of a sparse model. For more flexibility, first use reducespec to obtain a reduced-order model, then apply modalreal to the result.
Input Arguments
Name-Value Arguments
Output Arguments
References
[1] Stewart, G. W. “A Krylov--Schur Algorithm for Large Eigenproblems.” SIAM Journal on Matrix Analysis and Applications 23, no. 3 (January 2002): 601–14. https://doi.org/10.1137/S0895479800371529.