ncapScenario
Syntax
Description
Add-On Required: This feature requires the Automated Driving Toolbox Test Suite for Euro NCAP Protocols add-on.
Generate Scenario Descriptor
descriptor = ncapScenario(ncapTestName)descriptor, for the input
European New Car Assessment Programme (Euro
NCAP®) test name ncapTestName.
[
generates seed scenario descriptors for all scenarios for the specified test name, and
returns the scenario information descriptor,scenarioInfo] = ncapScenario(ncapTestName,AllScenarios=true)scenarioInfo.
[___] = ncapScenario(___,
specifies options using one or more name-value arguments, in addition to any combination
of arguments from previous syntaxes. For example, Name=Value)ShowProgress="GUI"
displays the scenario generation progress bar in a graphical user interface.
Generate Scenario Descriptor Using euroAssessment Object
Since R2026a
descriptor = ncapScenario(euroAssessmentObj,ncapTestName)descriptor, for the input
Euro NCAP test name
ncapTestName using the Euro NCAP assessment protocol specifications
euroAssessmentObj.
[
generates seed scenario descriptors for all scenarios for the specified test name, and
returns the scenario information descriptor,scenarioInfo] = ncapScenario(euroAssessmentObj,ncapTestName,AllScenarios=true)scenarioInfo.
Examples
Since R2026a
Specify a European New Car Assessment Programme (Euro NCAP) test name from protocol specification years 2026–2028.
ncapTestName = "CA FC CCRs";Create a Euro NCAP protocol specification object for protocol specification years 2026–2028.
euroAssessmentObj = euroAssessment(2026);
Generate a seed scenario descriptor for the Euro NCAP test, which you can use to create its variants.
descriptor = ncapScenario(euroAssessmentObj,ncapTestName);
Start the RoadRunner application interactively by using the roadrunnerSetup function. The function opens a dialog box in which you specify the project folder and installation folder to use when opening RoadRunner. The function returns a roadrunner object, rrApp, that enables you to perform common tasks in the RoadRunner application, such as opening, closing, and saving scenes and projects.
rrApp = roadrunnerSetup;
scenario = getScenario(descriptor,Simulator="RoadRunner",SimulatorInstance=rrApp);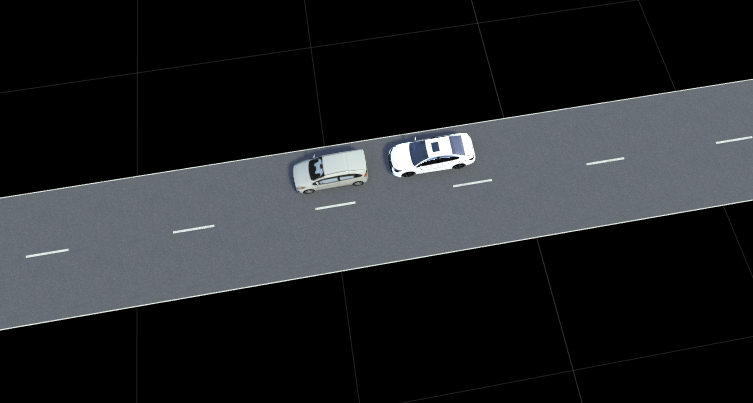
Specify the European New Car Assessment Programme (Euro NCAP) test name for the Vulnerable Road User Automatic Emergency Braking Crossing Car-to-Pedestrian Nearside Child Obstructed test.
ncapTestName = "VRU AEB Crossing CPNCO";Generate a seed scenario descriptor for the NCAP test, which you can use to create its variants.
descriptor = ncapScenario(ncapTestName);
Start the RoadRunner application interactively by using the roadrunnerSetup function. The function opens a dialog box in which you specify the project folder and installation folder to use when opening RoadRunner. The function returns a roadrunner object, rrApp, that enables you to perform common tasks in the RoadRunner application, such as opening, closing, and saving scenes and projects.
rrApp = roadrunnerSetup;
scenario = getScenario(descriptor,Simulator="RoadRunner",SimulatorInstance=rrApp);Connection status: 1
Connected to RoadRunner Scenario server on localhost:54322, with client id {f6d0fd72-45bf-4c8b-b7c7-ca51a698fe72}

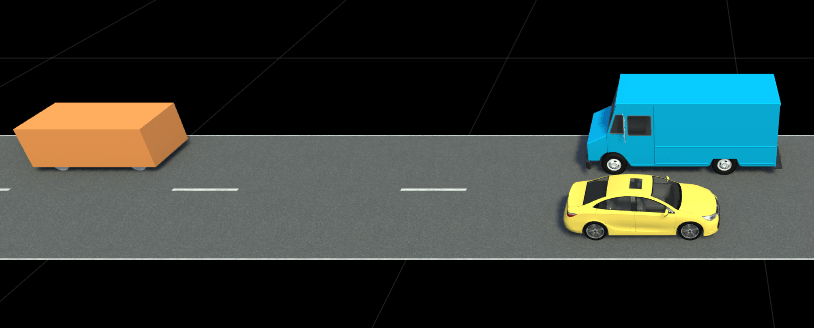
Specify the Euro NCAP test name for the Safety Assist Automatic Emergency Braking Car-to-Car Front head-on lane change scenario.
ncapTestName = "SA AEB CCFhol";Specify the path to your RoadRunner ego asset.
egoAssetInfo.AssetPath = "Vehicles/DeliveryVan.fbx_rrx.rrmeta";Generate an array of scenario descriptors and their scenario information for the specified Euro NCAP test name.
[descriptors,scenarioInfo] = ncapScenario(ncapTestName,AllScenarios=true,EgoAssetInfo=egoAssetInfo);
SA AEB CCFhol Progress: (100%)[==================================================]( 2/ 2)
Start the RoadRunner application interactively by using the roadrunnerSetup function. The function opens a dialog box in which you specify the project folder and installation folder to use when opening RoadRunner. The function returns a roadrunner object, rrApp, that enables you to perform common tasks in the RoadRunner application, such as opening, closing, and saving scenes and projects.
rrApp = roadrunnerSetup;
Specify a valid index for a scenario descriptor object.
idx = 1;
Create a RoadRunner scenario for the scenario descriptor object at the specified index.
scenario = getScenario(descriptors(idx),Simulator="RoadRunner",SimulatorInstance=rrApp);This figure shows an instance of the simulated Safety Assist Automatic Emergency Braking Car-to-Car Front head-on lane change scenario in RoadRunner, which contains an ego vehicle represented as a blue delivery van.