idNeuralStateSpace
Description
Use idNeuralStateSpace to create a black-box continuous-time or
discrete-time neural state-space model with identifiable (estimable) network weights and bias.
You can use the trained black-box model for control, estimation, optimization, and reduced
order modeling.
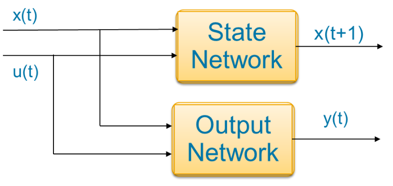
Continuous-time neural state-space models have the following general form,
where the state function F and the nontrivial output function H are approximated by neural networks. Because you need to measure all the states to properly train the state function, the states measurements are considered to be part of the output function. Here, e1 and e2 are measurement noises in the data sets which are minimized by the network training algorithm.
For discrete-time state-space systems, the state and output functions have this form.
For more information on neural state-space models, see What Are Neural State-Space Models?.
Creation
Description
nss = idNeuralStateSpace(nx)nx state variables and output identical to
state.
nss = idNeuralStateSpace(___,Name=Value)
For example, nss =
idNeuralStateSpace(3,NumInputs=2,NumOutputs=4,Ts=0.1) creates a
time-invariant discrete-time neural state-space object with 3 states,
2 inputs, four outputs (the first three are state measurements),
and sample time 0.1. The system is also time invariant (both state
and output functions do not explicitly depend on time) and does not have direct
feed-through (the input does not have immediate impact on output).
Input Arguments
Name-Value Arguments
Specify optional pairs of arguments as
Name1=Value1,...,NameN=ValueN, where Name is
the argument name and Value is the corresponding value.
Name-value arguments must appear after other arguments, but the order of the
pairs does not matter.
Use name-value arguments to specify NumInputs,
NumOutputs and the isTimeInvariant,
LatentDim, Ts, TimeUnit,
and FeedthroughInOutputNetwork properties of
nss.
Example: Ts=0.1
Number of input variables, specified as a nonnegative integer.
Example: NumInputs=2
Number of output variables, specified as a positive integer greater than or
equal to nx. The value must be greater than
nx because all the states are measured.
For example, if nx is 2,
NumOutputs=4 means that the state space system has four
outputs, with the first two outputs being state measurements, and the last two are
outputs from the output function H.
Example: NumOutputs=4
Option to set direct feedthrough, specified as one of the following:
true— the nontrivial output measurement y2 is an explicit function of the input, that is y2(t) = H(t,x,u).false— the nontrivial output measurement y2 is not an explicit function of the input, even ifNumInputsis greater than zero. This is the default case, and y2(t) = H(t,x).
This argument sets the FeedthroughInOutputNetwork property.
Example: HasFeedthrough=false
Flag indicating time invariance, specified as one of the following:
true— the system is time invariant, neither the state function F nor the output function H depend explicitly on time.false— the system is time varying, both the state and the output function depend explicitly on time.
This argument sets the IsTimeInvariant property.
Example: IsTimeInvariant=false
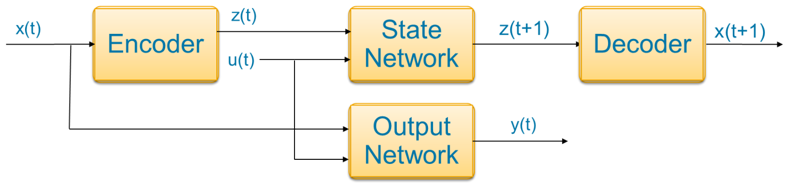
Dimension of the internal (latent) state, specified as NaN or
a positive integer. To add an encoder or decoder to your model, specify
LatentDim as a positive integer.
LatentDim Value | Model Framework |
|---|---|
NaN |
|
| A finite positive scalar |
|
This argument sets the LatentDim property.
Example: LatentDim=2
Sample time, specified as a nonnegative scalar, in units specified by the
TimeUnit property. For a continuous time model,
Ts is equal to 0 (default). Changing the value of Ts has no
impact on the system data and does not discretize or resample the model.
This argument sets the Ts property.
Example: Ts=0.1
Model time units, specified as:
'nanoseconds''microseconds''milliseconds''seconds''minutes''hours''days''weeks''months''years'
Model properties such as sample time Ts,
InputDelay, OutputDelay, and other time
delays are expressed in the units specified by TimeUnit.
Changing this property has no effect on other properties, and therefore changes the
overall system behavior. Use chgTimeUnit to convert between time units without
modifying system behavior.
This argument sets the TimeUnit property as a character
vector.
Properties
Object Functions
createMLPNetwork | Create and initialize a Multi-Layer Perceptron (MLP) network to be used within a neural state-space system |
setNetwork | Assign dlnetwork object as the state or output function of a
neural state-space model |
generateMATLABFunction | Generate MATLAB functions that evaluate the state and output functions, and their Jacobians, of a nonlinear grey-box or neural state-space model |
sim | Simulate response of identified model |
idNeuralStateSpace/evaluate | Evaluate a neural state-space system for a given set of state and input values and return state derivative (or next state) and output values |
idNeuralStateSpace/linearize | Linearize a neural state-space model around an operating point |
Examples
References
[1] Chen, Ricky T. Q., Yulia Rubanova, Jesse Bettencourt, and David Duvenaud. “Neural Ordinary Differential Equations.” arXiv, December 13, 2019. http://arxiv.org/abs/1806.07366.
Version History
Introduced in R2022bSee Also
Objects
Functions
createMLPNetwork|setNetwork|nssTrainingOptions|nlssest|nlssinit|generateMATLABFunction|idNeuralStateSpace/evaluate|idNeuralStateSpace/linearize|sim
Blocks
Live Editor Tasks
Topics
- What Are Neural State-Space Models?
- Estimate Neural State-Space System
- Estimate Nonlinear Autonomous Neural State-Space System
- Neural State-Space Model of Simple Pendulum System
- Reduced Order Modeling of a Nonlinear Dynamical System Using Neural State-Space Model with Autoencoder
- Augment Known Linear Model with Flexible Nonlinear Functions