基于自编码器的神经状态空间模型对非线性动力系统进行降阶建模
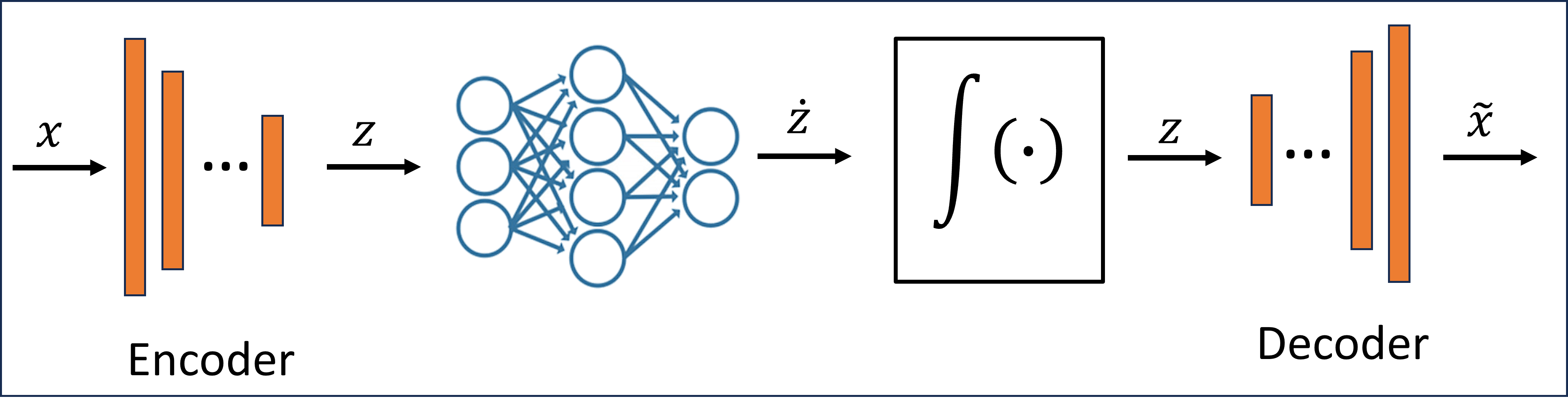
本示例展示了利用神经状态空间 (NSS) 建模技术对非线性动态系统进行降阶建模的过程。用于描述该方法的非线性系统是由多个非线性质量-弹簧-阻尼 (MSD) 系统级联而成的。降阶模型的开发关键在于训练包含三个部分的神经网络:
将数据映射到低维空间的编码器网络
在编码空间中学习动态特性的状态网络
将数据映射回原始空间的解码器网络
用于收集数据的 Simulink® 模型已在将非线性动力系统作为已辨识的线性参数可变模型进行降阶建模示例中介绍。
您选取 25 个质点,由此形成一个 50 维的维度,其中前 25 个状态 表示每个质点的位置,后 25 个状态 表示每个质点的速度。非线性体现在每个弹簧的刚度 中。在无外部扰动 () 的情况下激励系统,并施加随机阶梯输入 。您收集所有状态,包括位置 和速度 ,并将这个组合状态向量作为输出 。目标是确定一种神经状态空间模型,该模型采用自编码器有效地封装这些非线性动态特性。
数据准备
设置仿真 MSD 系统所需参数的值。您需设定质量数 、单个模块的质量 、线性弹簧刚度 、三次弹簧刚度 、线性阻尼系数 以及三次阻尼系数 。
rng default
M = 25;
m = 1;
k1 = 0.5;
k2 = 1;
b1 = 1;
b2 = 0.1;实验设置
使用示例末尾定义的辅助函数 stairInputs 生成两个随机的阶梯式输入。您用第一个来训练模型,第二个用于验证。
Nt = 1000; % number of samples Nu = 2; % number of input sequences u = cell(1,Nu); for i = 1:Nu [u{i},tin] = stairInputs(Nt); end
所有质点在起初都是静止的。您通过输入信号激发它们,从而启动振荡。
ic = zeros(2*M,1);
Tf = tin(end);
dt = tin(2) - tin(1);
% Initial condition for Simulink model (needed to update the size of x in MSD_NL)
F = 0;
U0 = 0;
dFt = [0, 0; Tf, 0];通过仿真 Simulink 模型收集数据。
dXall = zeros(2*M,Nt,Nu); dUall = zeros(1,Nt,Nu); for i=1:Nu x0 = ic; uin = u{i}; dut = [tin(:) uin(:)]; simout_NL = sim('MSD_NL'); states = simout_NL.simout.Data; states = squeeze(states); dXall(:,:,i) = states; dUall(:,:,i) = uin; end X = permute(dXall,[2,1,3]); U = permute(dUall,[2,1,3]); X = squeeze(mat2cell(X,Nt,2*M,ones(1,Nu))); U = squeeze(mat2cell(U,Nt,1,ones(1,Nu))); zt = iddata(X{1}, U{1}, Ts=dt, Tstart=0); % training data zv = iddata(X{2}, U{2}, Ts=dt, Tstart=0); % validation data
数据显示
显示输入数据以及估计和验证数据的 状态。
i =25; z_training = zt; z_training.y = z_training.y(:,i); z_validation = zv; z_validation.y = z_validation.y(:,i); idplot(z_training,z_validation) legend(Interpreter="none")
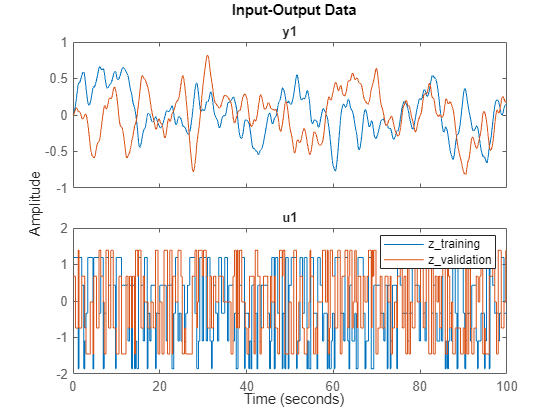
legend show通过操作旋转器,您会发现当 i 取值为 1 至 20 且 i 取值为 26 至 45 时,状态值非常小。这符合物理定律,因为这些状态代表最左侧的质点,它们几乎不受最右侧质点所受力的影响。这也表明,只有最右侧的五个质量体携带了大部分能量。因此选择将模型阶数降至 10(五个组件各取两个状态)。
NSS 模型估计
首先创建 NSS 对象及其用于训练的状态网络、编码器网络和解码器网络。将 idNeuralStateSpace 对象的LatentDim属性设置为 10,因为您正在将模型阶数降低至 10。
rng default nx = 50; nu = 1; nd = 10; nss = idNeuralStateSpace(nx,NumInputs=nu,LatentDim=nd); nss.StateNetwork = createMLPNetwork(nss,'state',... LayerSizes=[128 128],Activations="tanh"); nss.Encoder = createMLPNetwork(nss,'encoder',... LayerSizes=[128 128], Activations="tanh"); nss.Decoder = createMLPNetwork(nss,'decoder',... LayerSizes=[128 128],Activations="tanh");
使用nssTrainingOptions指定训练选项。为避免对整个数据集进行仿真,请使用 WindowSize 和 Overlap 属性将数据集拆分为多个小型试验。这既提高了训练速度,又提升了模型性能。要启用小批量学习,请设置 NumWindowFraction 属性。这有助于优化过程摆脱局部极小值,并提高泛化能力。
opt = nssTrainingOptions('adam');
opt.LearnRate = 0.005;
opt.MaxEpochs = 100;
opt.NumWindowFraction = 0.2;
opt.WindowSize = 40;
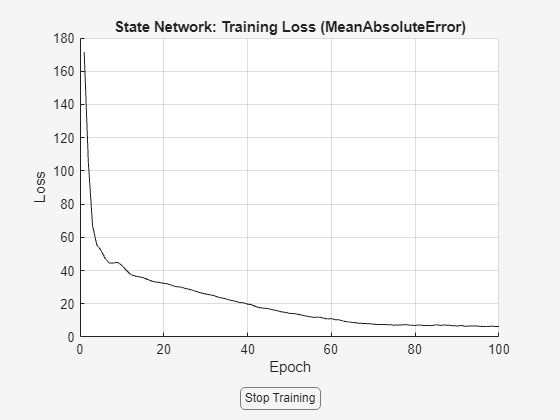
opt.Overlap = 39;使用 nlssest 训练模型。
warnState = warning('off','Ident:estimation:NparGTNsamp'); cleanupObj = onCleanup(@()warning(warnState)); UseTrainedModel = true; if UseTrainedModel load modelC.mat sys else sys = nlssest(zt,nss,opt); end clear("cleanupObj");
NSS 模型验证
验证模型,并计算验证数据与仿真输出之间的均方误差。
zy = sim(sys,zv);
MSE = goodnessOfFit(zv.y,zy.y,'MSE')MSE = 0.0033
显示 状态的验证数据和仿真结果。
j =25; zref = zv; % validation data zref.y = zref.y(:,j); zsim = zy; % simulation result zsim.Name = ''; zsim.y = zsim.y(:,j); idplot(zref,zsim)
legend
mdl = 'MSD_NSS';
open_system(mdl)
sim(mdl);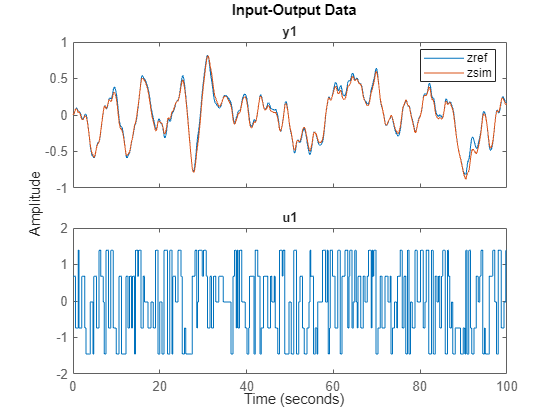
请注意,左侧 20 个质量的仿真结果不理想,因为这些值过小,在估计阶段被忽略了。要了解这些状态的动态特性,可通过增加编码器的潜在维度和/或对训练数据进行归一化处理(使每个状态对应的误差获得同等重视)。
生成随机阶梯信号函数
function [stairSignal, t] = stairInputs(L) stepHeights = randi([1, 5], 1, L); % Random step heights between 1 and 5 rng default stepWidths = randi([2, 6], 1, L); % Random step widths between 2 and 6 stairSignal = repelem(stepHeights, stepWidths); stairSignal = normalize(stairSignal); stairSignal = stairSignal(1:L); t = 0:(length(stairSignal) - 1); t = t/10; end