filter
1 维数字滤波器
说明
示例
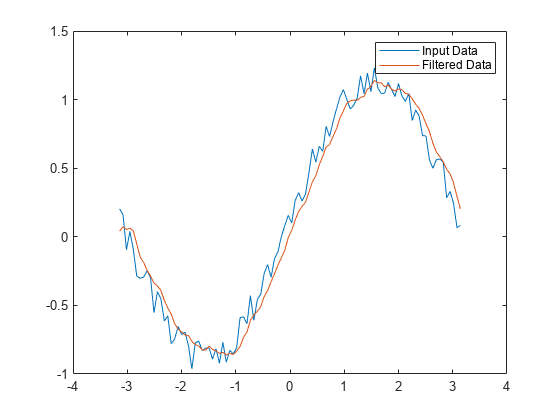
移动平均滤波器是用于对含噪数据进行平滑处理的常用方法。此示例使用 filter 函数计算沿数据向量的平均值。
创建一个由正弦曲线数据组成的 1×100 行向量,其中的正弦曲线被随机干扰所损坏。
t = linspace(-pi,pi,100); rng default %initialize random number generator x = sin(t) + 0.25*rand(size(t));
移动平均滤波器沿数据移动长度为 的窗口,并计算每个窗口中包含的数据的平均值。以下差分方程定义向量 的移动平均滤波器:
窗口大小为 5 时,计算有理传递函数的分子和分母系数。
windowSize = 5; b = (1/windowSize)*ones(1,windowSize); a = 1;
求数据的移动平均值,并绘制其对原始数据的图。
y = filter(b,a,x); plot(t,x) hold on plot(t,y) legend('Input Data','Filtered Data')
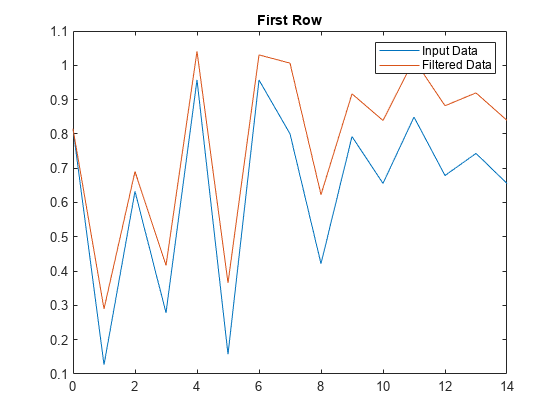
此示例使用以下有理传递函数对数据的矩阵进行滤波。
创建一个由随机输入数据组成的 2×15 矩阵。
rng default %initialize random number generator x = rand(2,15);
定义有理传递函数的分子和分母系数。
b = 1; a = [1 -0.2];
沿着 x 的第二维度应用传递函数并返回每行的一维数字滤波结果。绘制原始数据的第一行对已滤波数据的图。
y = filter(b,a,x,[],2); t = 0:length(x)-1; %index vector plot(t,x(1,:)) hold on plot(t,y(1,:)) legend('Input Data','Filtered Data') title('First Row')
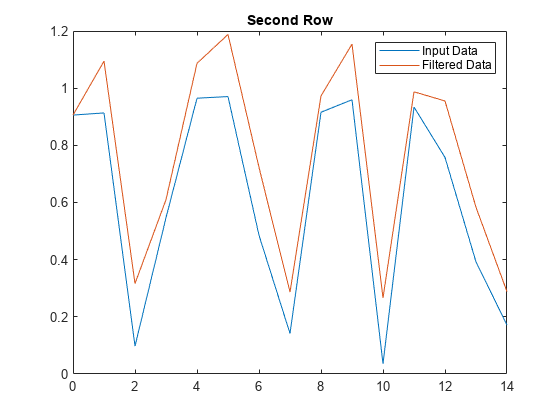
绘制输入数据的第二行对已滤波数据的图。
figure plot(t,x(2,:)) hold on plot(t,y(2,:)) legend('Input Data','Filtered Data') title('Second Row')
定义一个窗大小为 3 的移动平均滤波器。
windowSize = 3; b = (1/windowSize)*ones(1,windowSize); a = 1;
求数据的 1×6 行向量的三点移动平均值。
x = [2 1 6 2 4 3]; y = filter(b,a,x)
y = 1×6
0.6667 1.0000 3.0000 3.0000 4.0000 3.0000
默认情况下,filter 函数将滤波器延迟初始化为零,并假设过去的输入和输出都为零。在这种情况下,y 的前两个元素分别是 x 的第一个元素和前两个元素的三点移动平均值。换句话说,第一个元素 0.6667 是 2 的三点平均值,第二个元素 1 是 2 和 1 的三点平均值。
要在数据中包含其他过去的输入和输出,请将初始条件指定为滤波器延迟。当前输入的这些初始条件是通过将相同的传递函数应用于过去的输入(和过去的输出)而获得的最终条件。例如,包括 [1 3] 的过去输入。在没有滤波器延迟的情况下,过去的输出是 (0+0+1)/3 和 (0+1+3)/3。
x_past = [1 3]; y_past = filter(b,a,x_past)
y_past = 1×2
0.3333 1.3333
不过,您可以假设这些过去的输入的尾部为零,继续应用相同的传递函数来生成更多非零输出。这些进一步的输出是 (1+3+0)/3 和 (3+0+0)/3,它们表示从过去的输入中获得的最终条件。要计算这些最终条件,请指定 filter 函数的第二个输出参量。
[y_past,zf] = filter(b,a,x_past)
y_past = 1×2
0.3333 1.3333
zf = 2×1
1.3333
1.0000
要在当前数据中包含过去的输入,请使用 filter 函数的第四个输入参量指定滤波器延迟。使用过去数据的最终条件作为当前数据的初始条件。
y = filter(b,a,x,zf)
y = 1×6
2.0000 2.0000 3.0000 3.0000 4.0000 3.0000
在本例中,y 的第一个元素成为 1、3 和 2 的三点移动平均值,即 2,而 y 的第二个元素成为 3、2 和 1 的移动平均值,即 2。
使用滤波器延迟的初始条件和最终条件对各部分中的数据进行滤波,尤其是需要考虑内存限制时请执行此操作。
生成一个大型的随机数据序列并将其拆分为两段:x1 和 x2。
x = randn(10000,1); x1 = x(1:5000); x2 = x(5001:end);
整个序列 x 是 x1 和 x2 的垂直串联。
定义有理传递函数的分子和分母系数,
b = [2,3]; a = [1,0.2];
对子序列 x1 和 x2 进行滤波,一次一个。输出对 x1 进行滤波的最终条件,以便在第一段末尾存储滤波器的内部状态。
[y1,zf] = filter(b,a,x1);
将对 x1 进行滤波的最终条件用作对第二段也就是 x2 进行滤波的初始条件。
y2 = filter(b,a,x2,zf);
y1 是来自 x1 的滤波后的数据,而 y2 是来自 x2 的滤波后的数据。整个滤波后的序列是 y1 和 y2 的垂直串联。
同时对整个序列进行滤波以供比较。
y = filter(b,a,x); isequal(y,[y1;y2])
ans = logical
1
输入参数
有理传递函数的分子系数,指定为向量。
数据类型: double | single | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | logical
复数支持: 是
有理传递函数的分母系数,指定为向量。
数据类型: double | single | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | logical
复数支持: 是
输入数据,指定为向量、矩阵或多维数组。
数据类型: double | single | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | logical
复数支持: 是
滤波器延迟的初始条件,指定为向量、矩阵或多维数组。
如果
zi是向量,则它的长度必须是max(length(a),length(b))-1。如果
zi是矩阵或多维数组,则主维度的大小必须为max(length(a),length(b))-1。剩余的每个维度的大小必须与x的相应维度的大小匹配。例如,假设沿 3×4×5 数组x的第二个维度 (dim = 2) 使用filter。数组zi的大小必须为[max(length(a),length(b))-1]×3×5。
由 [] 指定的默认值将所有滤波器延迟初始化为零。
数据类型: double | single | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | logical
复数支持: 是
沿其运算的维度,指定为正整数标量。如果不指定维度,则默认值是大小不等于 1 的第一个数组维度。
以一个二维输入数组 x 为例。
如果
dim = 1,则filter(b,a,x,zi,1)对x的列进行运算,并返回应用于每列的过滤器。
如果
dim = 2,则filter(b,a,x,zi,2)对x的行进行运算,并返回应用于每行的过滤器。
如果 dim 大于 ndims(x),则 filter 认为 x 具有额外维度,总维数为 dim,且额外维度的大小为 1。例如,如果 x 是大小为 2×3 且 dim = 3 的矩阵,则 filter 沿 x 的第三个维度执行运算,和 x 大小为 2×3×1 的情况一样。
数据类型: double | single | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | logical
输出参量
详细信息
提示
要将
filter函数与来自 FIR 滤波器的b系数结合使用,请使用y = filter(b,1,x)。如果您有 Signal Processing Toolbox™,请将
y = filter(d,x)与digitalFilter(Signal Processing Toolbox) 对象d结合使用来对输入信号x进行滤波。要根据频率响应设定生成d,请使用designfilt(Signal Processing Toolbox)。有关滤波函数的详细信息,请参阅数字滤波 (Signal Processing Toolbox)。
参考
[1] Oppenheim, Alan V., Ronald W. Schafer, and John R. Buck. Discrete-Time Signal Processing. Upper Saddle River, NJ: Prentice-Hall, 1999.