nearest
半径范围内最近的邻点
说明
示例
创建并绘制一个具有加权边的图。
s = [1 1 1 1 1 2 2 2 3 3 3 3 3]; t = [2 4 5 6 7 3 8 9 10 11 12 13 14]; weights = randi([1 10],1,13); G = graph(s,t,weights); p = plot(G,'Layout','force','EdgeLabel',G.Edges.Weight);
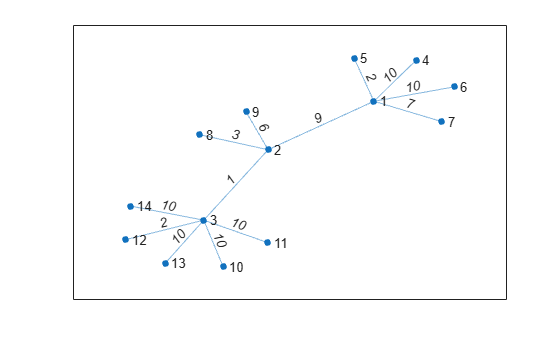
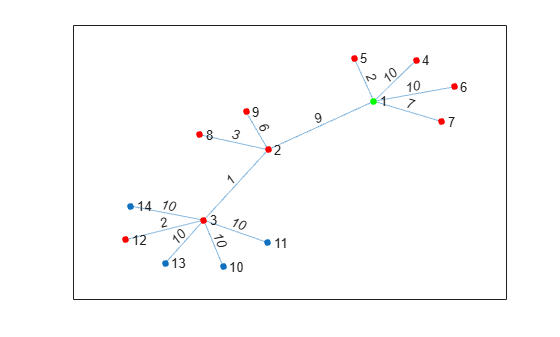
确定哪些节点在节点 1 周围半径为 15 的范围内。
nn = nearest(G,1,15)
nn = 9×1
5
7
2
3
4
6
8
12
9
源节点以绿色突出显示,最近的邻点以红色突出显示。
highlight(p,1,'NodeColor','g') highlight(p,nn,'NodeColor','r')
创建并绘制一个具有加权边的图。
s = [1 1 1 2 2 6 6 7 7 3 3 9 9 4 4 11 11 8];
t = [2 3 4 5 6 7 8 5 8 9 10 5 10 11 12 10 12 12];
weights = [10 10 10 10 10 1 1 1 1 1 1 1 1 1 1 1 1 1];
G = graph(s,t,weights);
plot(G,'EdgeLabel',G.Edges.Weight)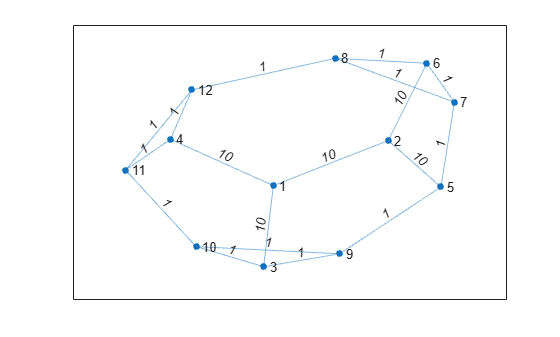
确定哪些节点在节点 3 周围半径为 5 的范围内,并返回到每个节点的距离。
[nn,dist] = nearest(G,3,5)
nn = 9×1
9
10
5
11
4
7
12
6
8
dist = 9×1
1
1
2
2
3
3
3
4
4
创建并绘制一个具有加权边的有向图。
s = {'a' 'a' 'a' 'b' 'c' 'c' 'e' 'f' 'f'};
t = {'b' 'c' 'd' 'a' 'a' 'd' 'f' 'a' 'b'};
weights = [1 1 1 2 2 2 2 2 2];
G = digraph(s,t,weights);
plot(G,'EdgeLabel',G.Edges.Weight)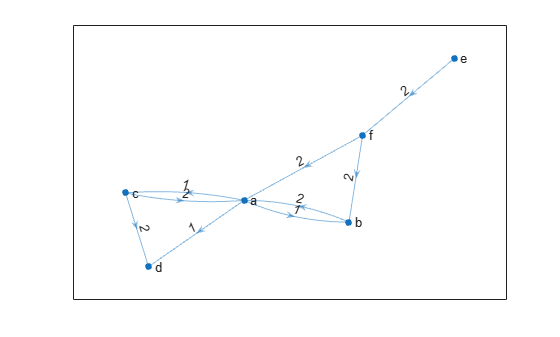
确定节点 'a' 周围半径为 1 的范围内最近的节点,按照节点 'a' 的出向路径距离测量。
nn_out = nearest(G,'a',1)nn_out = 3×1 cell
{'b'}
{'c'}
{'d'}
通过将半径指定为 Inf,确定有入向路径通向节点 'a' 的所有节点。
nn_in = nearest(G,'a',Inf,'Direction','incoming')
nn_in = 4×1 cell
{'b'}
{'c'}
{'f'}
{'e'}
输入参数
名称-值参数
输出参量
扩展功能
版本历史记录
在 R2016a 中推出
另请参阅
shortestpath | distances | shortestpathtree | neighbors | successors | predecessors