shortestpathtree
从节点的最短路径树
语法
说明
TR = shortestpathtree(___,Name,Value)shortestpathtree(G,s,'OutputForm','vector') 返回用于描述最短路径树的数值向量。
示例
求从一个源节点到图中每个其他可达节点的最短路径,并绘制结果。
创建一个有向图。
s = [1 1 2 3 3 4 4 6 6 7 8 7 5]; t = [2 3 4 4 5 5 6 1 8 1 3 2 8]; G = digraph(s,t)
G =
digraph with properties:
Edges: [13×1 table]
Nodes: [8×0 table]
计算从节点 1 到图中每个其他可达节点的最短路径。然后,在图上绘制所得到的树。
TR = shortestpathtree(G,1); p = plot(G); highlight(p,TR,'EdgeColor','r')
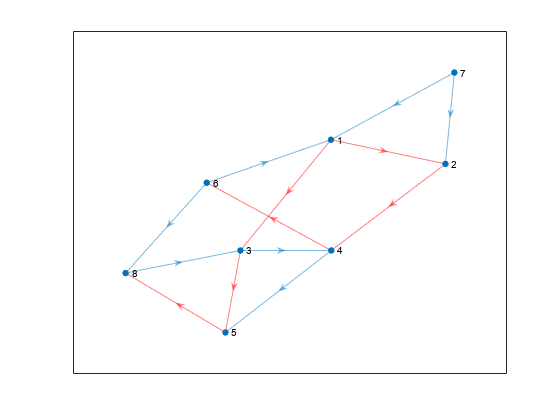
由于不存在从节点 1 到节点 7 的路径,节点 7 从树中断开连接。
求从图中每个节点到一个目标节点的最短路径,并绘制结果。
创建并绘制一个图。
s = [1 1 1 1 1 1 1 2 2 7 7 7 7 9 9 3 3 1 6 4 8 10 6 8 4 5]; t = [2 3 4 5 6 8 7 6 7 5 6 8 9 6 8 6 10 10 10 10 10 11 11 11 8 8]; G = graph(s,t); x = [0 0.5 -0.5 -0.5 0.5 0 1.5 0 2 -1.5 -2]; y = [0 0.5 0.5 -0.5 -0.5 2 0 -2 0 0 0]; plot(G,'XData',x,'YData',y)
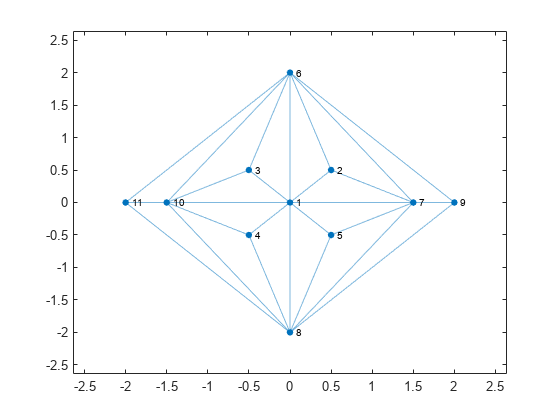
查找从图中每个节点到节点 10 的最短路径。绘制所得到的树。
TR = shortestpathtree(G,'all',10);
plot(TR)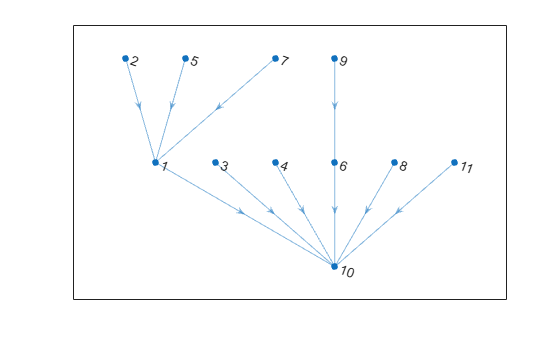
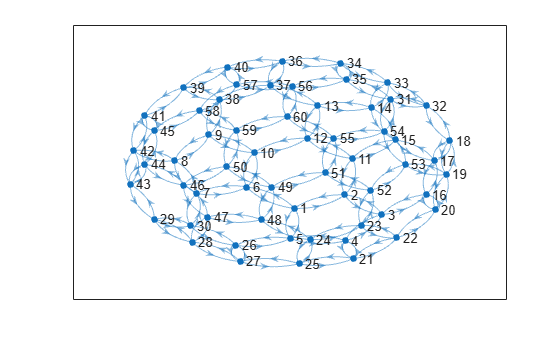
求从单一源节点到多个目标节点的最短路径和路径长度。
创建并绘制一个图。
G = digraph(bucky); plot(G)
求从节点 23 到多个其他节点的最短路径。将 OutputForm 指定为 cell,以元胞数组形式返回最短路径。指定两个输出以同时返回最短路径距离。
target = [1 5 13 32 44]; [TR,D] = shortestpathtree(G,23,target,'OutputForm','cell')
TR=5×1 cell array
{[ 23 22 21 4 5 1]}
{[ 23 22 21 4 5]}
{[23 22 20 16 17 15 14 13]}
{[ 23 22 20 19 18 32]}
{[ 23 24 48 47 46 44]}
D = 1×5
5 4 7 5 5
tree{j} 是从节点 23 到节点 target(j) 的最短路径,长度为 D(j)。
求从节点 21 到节点 5 的路径和路径长度。
path = TR{2}path = 1×5
23 22 21 4 5
path_length = D(2)
path_length = 4
输入参数
名称-值参数
输出参量
提示
shortestpath、shortestpathtree和distances函数不支持具有负边权重的无向图,或更通俗地说,不支持包含负循环的任何图,原因如下:负循环是从节点出发回到自身的路径,路径上的边权重之和为负值。如果两个节点之间的路径上具有负循环,则这两个节点之间不存在最短路径,因为始终可以通过遍历负循环找到更短路径。
无向图中的单个负边权重会创建一个负循环。
扩展功能
版本历史记录
在 R2015b 中推出
另请参阅
shortestpath | distances | nearest | graph | digraph