ss2tf
将状态空间表示形式转换为传递函数
说明
示例
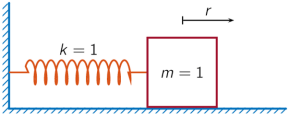
一维离散时间振荡系统由单位质点 通过一根单位弹性常量弹簧连接到墙壁构成。传感器以 Hz 对质量的加速度 取样。
生成 50 个时间采样。定义采样间隔 。
Fs = 5; dt = 1/Fs; N = 50; t = dt*(0:N-1);
振荡器可以通过状态空间方程描述。
其中 是状态向量, 和 分别是质点的位置和速度,而矩阵
A = [cos(dt) sin(dt);-sin(dt) cos(dt)]; B = [1-cos(dt);sin(dt)]; C = [-1 0]; D = 1;
系统使用正方向的单位冲激进行刺激。使用该状态空间模型计算系统从全零的初始状态开始的时间演进。
u = [1 zeros(1,N-1)]; x = [0;0]; for k = 1:N y(k) = C*x + D*u(k); x = A*x + B*u(k); end
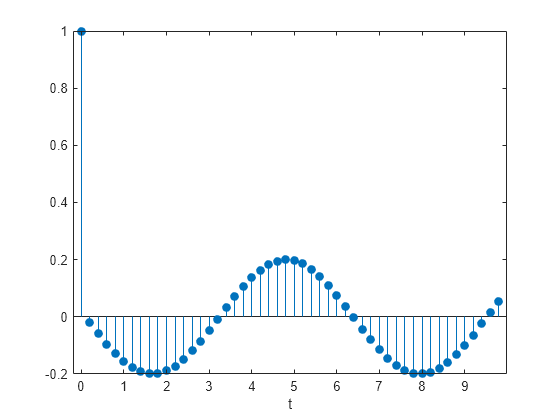
以时间函数形式绘制质量的加速度。
stem(t,y,'filled') xlabel('t')
使用传递函数 H(z) 过滤输入以计算时间相关加速度。绘制结果。
[b,a] = ss2tf(A,B,C,D); yt = filter(b,a,u); stem(t,yt,'filled') xlabel('t')
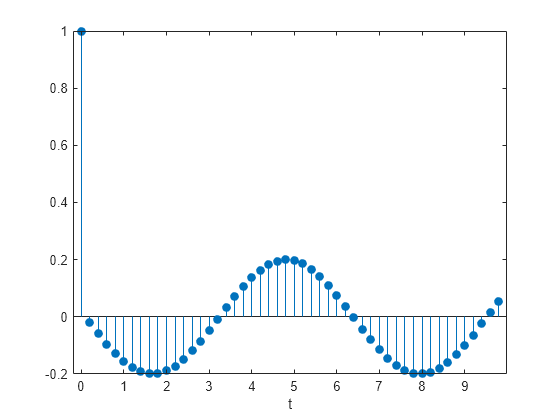
系统的传递函数包含一个解析式:
使用表达式过滤输入。绘制响应。
bf = [1 -(1+cos(dt)) cos(dt)]; af = [1 -2*cos(dt) 1]; yf = filter(bf,af,u); stem(t,yf,'filled') xlabel('t')

所有这三种情况下的结果都相同。
理想的一维振荡系统由位于两面墙壁间的两个单位质点 和 组成。每个质点通过一根单位弹性常量弹簧连接到最近的墙壁。另外一根弹簧连接这两个质点。传感器以 Hz 的频率对 和 (质点的加速度)采样。

将总测量时间指定为 16 秒。定义采样间隔 。
Fs = 16; dt = 1/Fs; N = 257; t = dt*(0:N-1);
系统可以由状态空间模型描述
其中 是状态向量, 和 分别是第 个质点的位置和速度。输入向量 ,输出向量 。状态空间矩阵为
连续时间状态空间矩阵为
表示合适大小的单位矩阵。
Ac = [0 1 0 0; -2 0 1 0; 0 0 0 1; 1 0 -2 0]; A = expm(Ac*dt); Bc = [0 0; 1 0; 0 0; 0 1]; B = Ac\(A-eye(4))*Bc; C = [-2 0 1 0; 1 0 -2 0]; D = eye(2);
第一个质点 接收正向的单位冲激。
ux = [1 zeros(1,N-1)]; u0 = zeros(1,N); u = [ux;u0];
使用该模型计算系统从全零的初始状态开始的时间演进。
x = [0 0 0 0]'; y = zeros(2,N); for k = 1:N y(:,k) = C*x + D*u(:,k); x = A*x + B*u(:,k); end
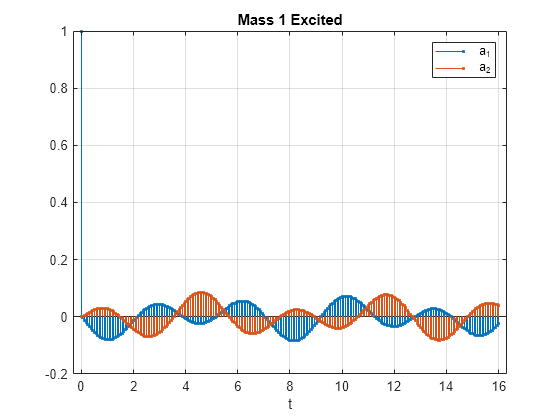
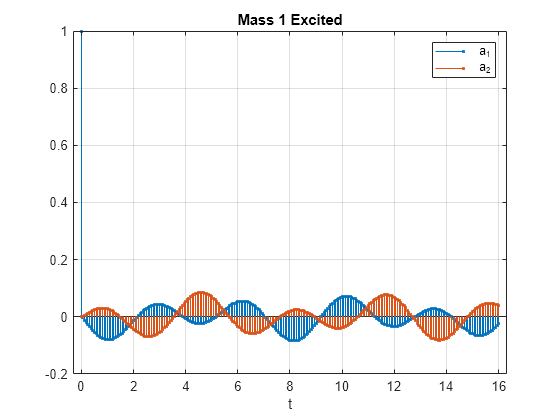
以时间函数形式绘制两个质点的加速度。
stem(t,y','.') xlabel('t') legend('a_1','a_2') title('Mass 1 Excited') grid
将系统转换为其传递函数表示形式。求得对第一个质点的正单位冲激刺激的系统响应。
[b1,a1] = ss2tf(A,B,C,D,1); y1u1 = filter(b1(1,:),a1,ux); y1u2 = filter(b1(2,:),a1,ux);
绘制结果。传递函数提供与状态空间模型相同的响应。
stem(t,[y1u1;y1u2]','.') xlabel('t') legend('a_1','a_2') title('Mass 1 Excited') grid
系统将重置为其初始配置。现在,其他质点 接收正向单位冲激。计算该系统的时间演进。
u = [u0;ux]; x = [0;0;0;0]; for k = 1:N y(:,k) = C*x + D*u(:,k); x = A*x + B*u(:,k); end
绘制加速度。将交换各个质点的响应。
stem(t,y','.') xlabel('t') legend('a_1','a_2') title('Mass 2 Excited') grid
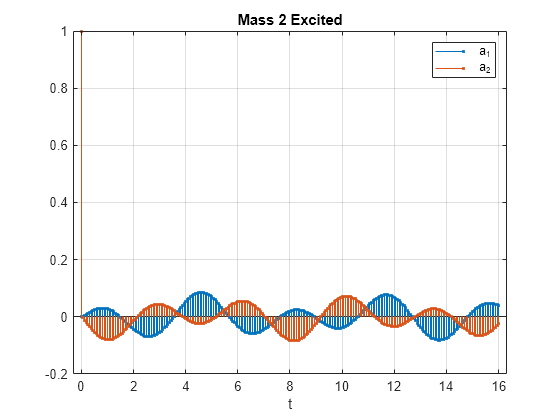
求得对第二个质点的正单位冲激刺激的系统响应。
[b2,a2] = ss2tf(A,B,C,D,2); y2u1 = filter(b2(1,:),a2,ux); y2u2 = filter(b2(2,:),a2,ux);
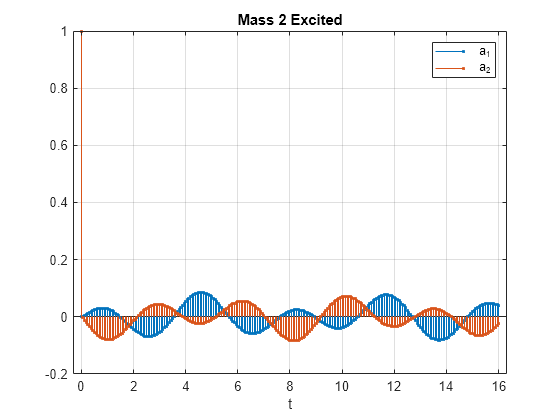
绘制结果。传递函数提供与状态空间模型相同的响应。
stem(t,[y2u1;y2u2]','.') xlabel('t') legend('a_1','a_2') title('Mass 2 Excited') grid
输入参数
输出参量
详细信息
版本历史记录
在 R2006a 之前推出