增益计算和调节
Motor Control Blockset 可帮助您为电流环、转速环和位置环选择和调整控制器增益(PI 增益)。这些增益首先根据电机的电气参数(电阻、电感、惯量)以及每个控制环的期望带宽或响应时间计算得出。在 FOC 中,首先调节电流环(d 轴和 q 轴),因为它们必须保持快速响应且具有良好的阻尼,以确保适当的转矩和磁通控制。然后调节转速环增益,使其比电流环慢,从而确保稳定的级联控制。正确的增益计算和调节对于避免振荡、过多的转矩波纹、慢响应甚至驱动系统的不稳定性至关重要。
函数
mcb.getPIControllerParameters | Compute gains for PI controller in field-oriented control |
mcb.calcFOCGains | Compute gains and transfer functions for PI controller in field-oriented control of PMSM (自 R2025a 起) |
模块
主题
- 估计控制增益并调节控制参数
执行转速和转矩控制子系统的控制参数调节。
- Obtain Controller Gains to Run Motor Using Field-Oriented Control
This example shows how to obtain PI controller gains using Optimum theory for the current control loop and speed control loop in Field Oriented Control (FOC) of a Permanent Magnet Synchronous Motor (PMSM).
精选示例
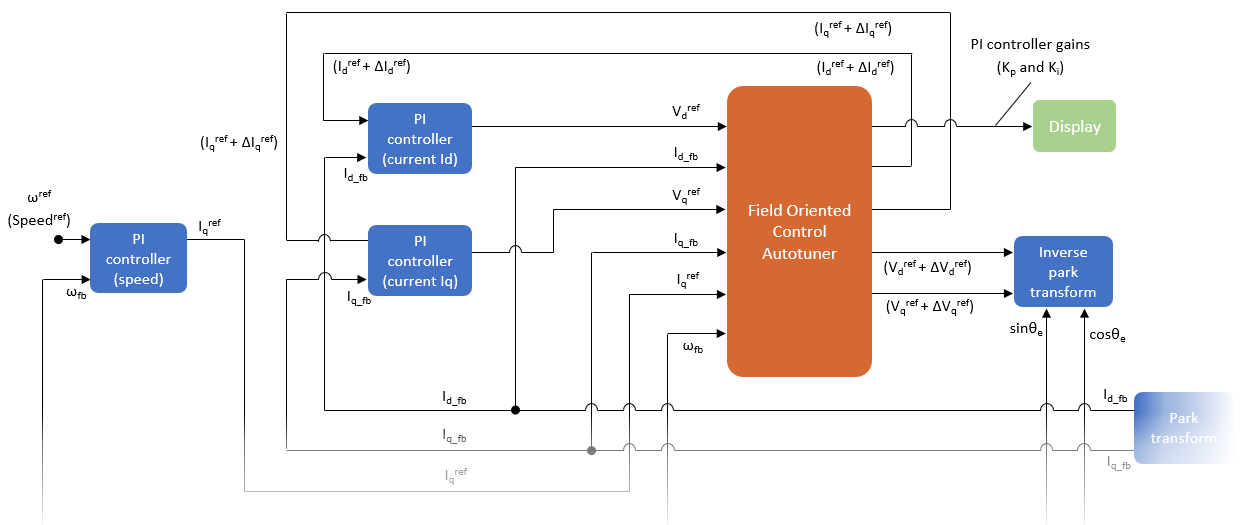
使用 Field Oriented Control Autotuner 调节 PI 控制器
此示例通过使用 Field Oriented Control Autotuner 模块计算转速和电流控制环中可用的 PI 控制器的增益值。有关此模块的详细信息,请参阅Field Oriented Control Autotuner。有关磁场定向控制的详细信息,请参阅磁场定向控制。
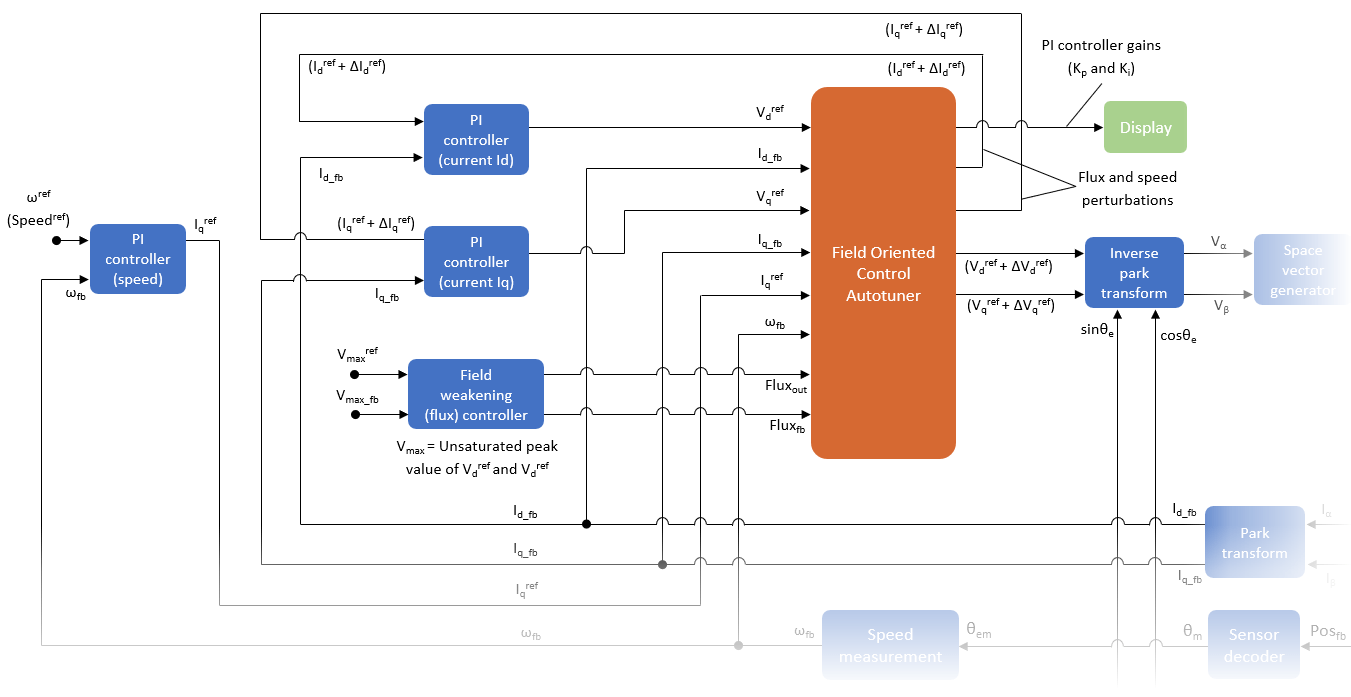
Tune PI Controllers (in Field-Weakening Control Mode) Using FOC Autotuner Block
Uses the Field Oriented Control Autotuner block to compute the gain values of the PI controllers available in the speed, current, and flux control loops of a field-weakening control algorithm. For details about this block, see Field Oriented Control Autotuner.
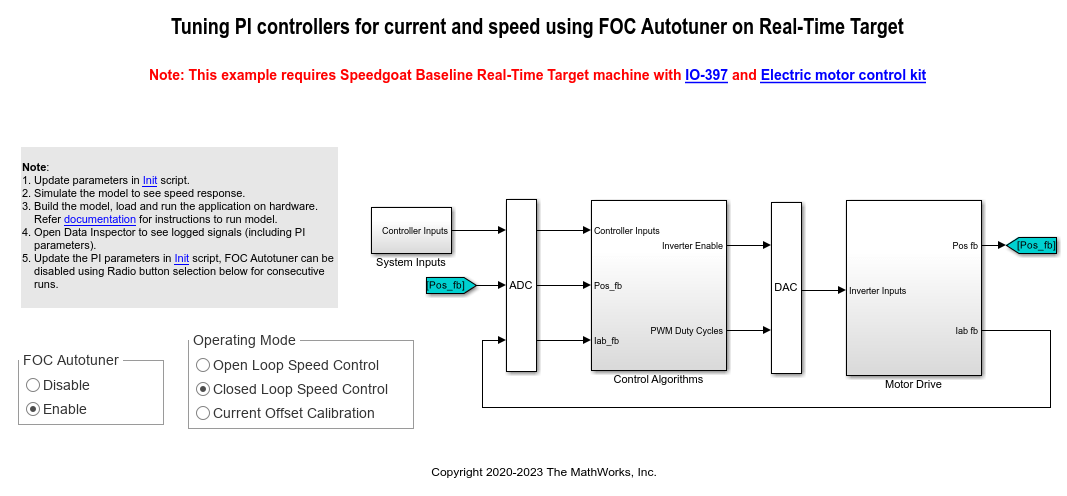
Tune PI Controllers Using Field Oriented Control Autotuner Block on Real-Time Systems
Compute the gain values of PI controllers within the speed and current controllers by using the Field Oriented Control Autotuner block.