Mapping
Occupancy maps are used to represent obstacles in an environment and define limits of your world. You can build maps and update obstacle locations from sensor readings using raycasting. Sync with existing maps and move local frames to create egocentric maps that follow your vehicle. Maps support binary and probabilistic values for 2-D maps and a probabilistic representation for 3-D maps.
Use these maps along with Motion Planning to plan paths in a map, or use algorithms to estimate your vehicle pose in an environment.
Functions
Topics
- Occupancy Grids
Details of occupancy grid functionality and map structure.
- Fuse Multiple Lidar Sensors Using Map Layers
Occupancy maps offer a simple yet robust way of representing an environment for robotic applications by mapping the continuous world-space to a discrete data structure.
- Build Occupancy Map from Depth Images Using Visual Odometry and Optimized Pose Graph
This example shows how to reduce the drift in the estimated trajectory (location and orientation) of a monocular camera using 3-D pose graph optimization.
Featured Examples
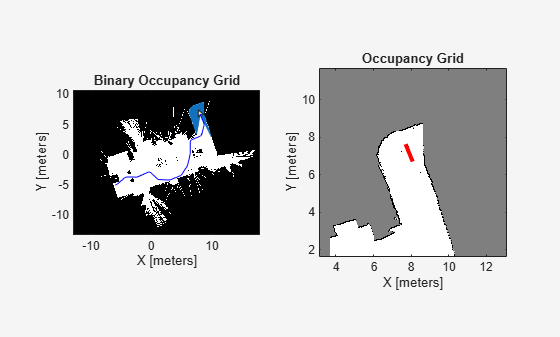
Create Egocentric Occupancy Maps Using Range Sensors
Occupancy Maps offer a simple yet robust way of representing an environment for robotic applications by mapping the continuous world-space to a discrete data structure. Individual grid cells can contain binary or probabilistic information, where 0 indicates free-space, and 1 indicates occupied space. You can build up this information over time using sensor measurements and efficiently store them in the map. This information is also useful for more advanced workflows, such as collision detection and path planning.
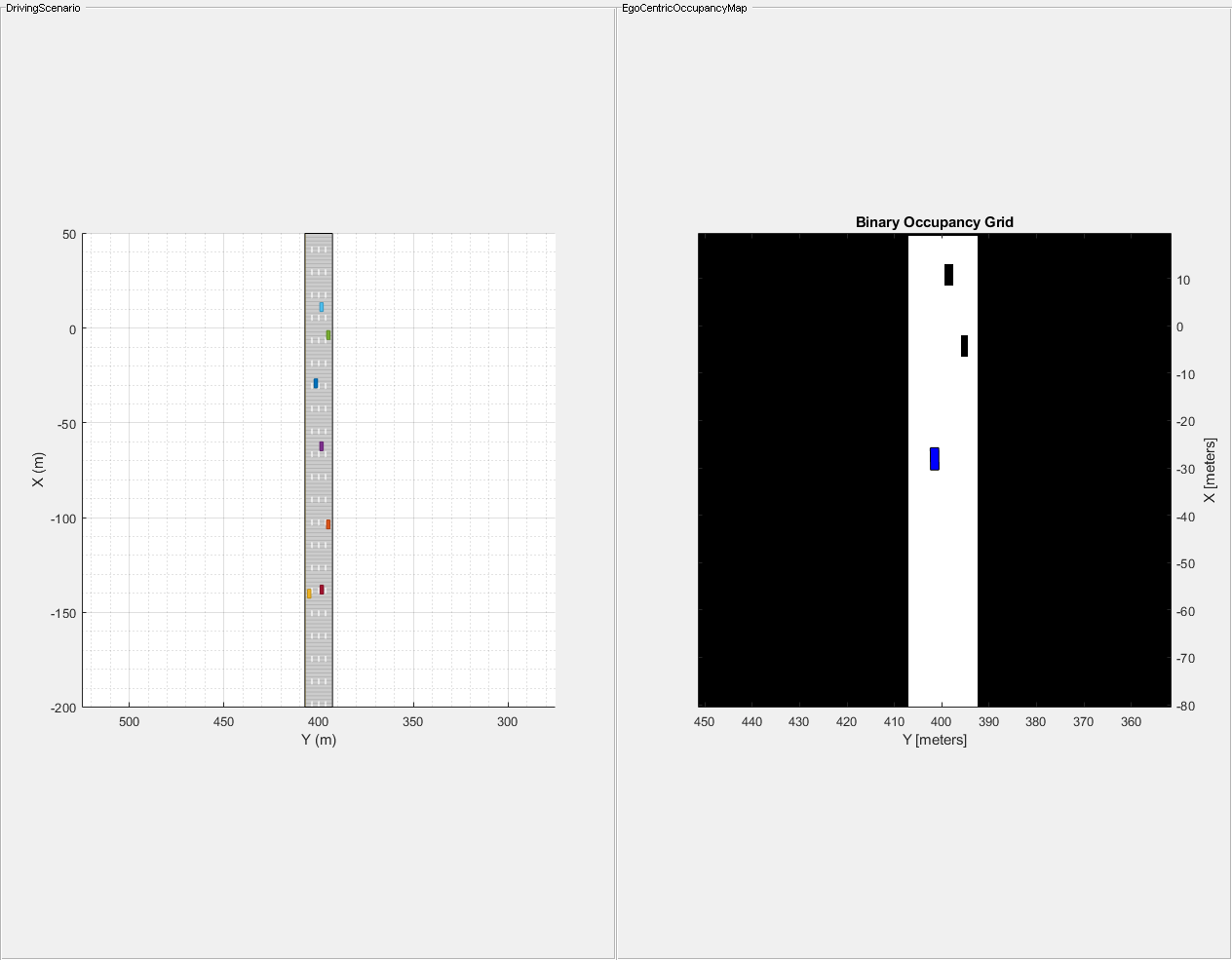
Create Egocentric Occupancy Map from Driving Scenario Designer
Create an egocentric occupancy map from the Driving Scenario Designer app. This example uses obstacle information from the vision detection generator to update the egocentric occupancy map.
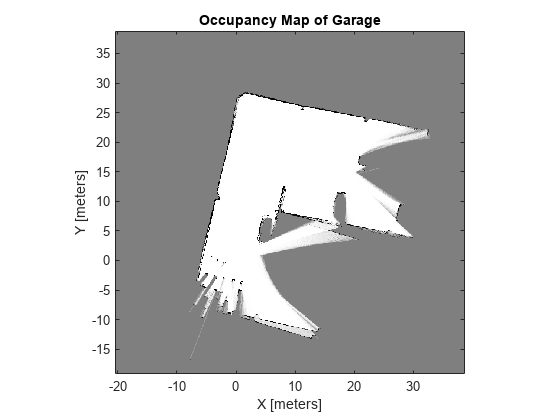
Build Occupancy Map from Lidar Scans and Poses
The buildMap function takes in lidar scan readings and associated poses to build an occupancy grid as lidarScan objects and associated [x y theta] poses to build an occupancyMap.