insCFGyroscope
Description
The insCFGyroscope object models gyroscope readings for
insCF sensor fusion. When creating an insCF filter
object, you can specify an insCFGyroscope object to enable the filter to use
gyroscope data to predict orientation.
Creation
Syntax
Examples
Estimate orientation from recorded IMU data by using a complementary filter, represented by an insCF filter object.
Load the rpy_9axis.mat file into the workspace. The file contains recorded accelerometer, gyroscope, and magnetometer sensor data from a device oscillating in pitch (around the y-axis), yaw (around the z-axis), and roll (around the x-axis). The file also contains the sample rate of the recording. Extract the sensor data and sample rate from the loaded workspace variable.
ld = load("rpy_9axis.mat"); accelerometerData = ld.sensorData.Acceleration; gyroscopeData = ld.sensorData.AngularVelocity; magnetometerData = ld.sensorData.MagneticField; imuSampleRate = ld.Fs; % Hz
Create a timetable from the accelerometer, gyroscope, and magnetometer data.
imuDataTT = timetable(accelerometerData,gyroscopeData,magnetometerData,'SampleRate',imuSampleRate,'StartTime',seconds(1/imuSampleRate),'VariableNames',{'Accelerometer', 'Gyroscope', 'Magnetometer'});
Create an insCF filter object using sensor models for accelerometer, magnetometer, and gyroscope. To model orientation, specify insCFMotionOrientation as the motion model.
acc = insCFAccelerometer; mag = insCFMagnetometer; gyro = insCFGyroscope; motionModel = insCFMotionOrientation; filter = insCF(acc,mag,gyro,motionModel);
Specify the initial orientation of your sensors. You can obtain the initial orientation by using the ecompass function with the accelerometer and magnetometer data at the first time step.
initialOrientation = [0.006727036930852 -0.131203115007920 -0.058108427699335 -0.989628162602834];
stateparts(filter,"Orientation",initialOrientation)Specify the sensor gains. The sensor gain value must be between 0 and 1.
gainparts(filter,"Accelerometer",0) gainparts(filter,"Magnetometer",0.01)
Fuse the accelerometer, gyroscope, and magnetometer data using the insCF filter.
outTT = estimateStates(filter,imuDataTT);
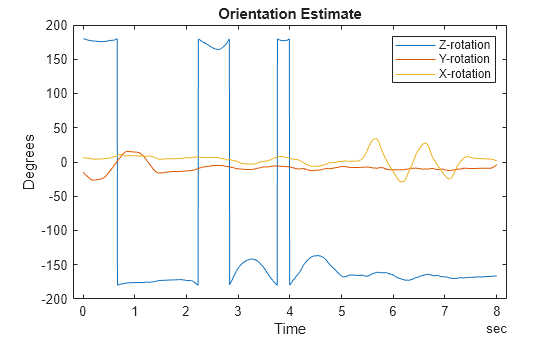
Visualize the estimated orientation.
t = outTT.Properties.RowTimes; plot(t,eulerd(outTT.Orientation,"ZYX","frame")); title("Orientation Estimate"); legend("Z-rotation","Y-rotation","X-rotation"); xlabel("Time"); ylabel("Degrees");
Estimate pose (orientation and position) and velocity from IMU and GPS data by using a complementary filter, represented by an insCF filter object.
Load the racetrackINSCFDataset.mat file, which contains a timetable with simulated accelerometer, gyroscope, magnetometer, and GPS sensor data for a racetrack-like trajectory, into the workspace. The file also contains the sample rate of the data.
load("raceTrackINSCFDataset.mat")Create an insCF filter object that includes the accelerometer, gyroscope, magnetometer, and GPS sensor objects, as well as an insCFMotionPose motion model object for modeling pose.
% Sensor object for predicting orientation gyro = insCFGyroscope; % Sensor objects for correcting orientation accel = insCFAccelerometer; mag = insCFMagnetometer; % Sensor object for correcting position gps = insCFGPS(ReferenceLocation=localOrigin); % Pose motion model motModel = insCFMotionPose; % Filter object filt = insCF(accel,mag,gyro,gps,motModel);
Specify the initial position, velocity, and orientation from the measurement data.
% Set initial position stateparts(filt,"Position",initPos) % Set initial orientation stateparts(filt,"Orientation",initOrient) % Set initial velocity stateparts(filt,"Velocity",initVel)
Specify the sensor gains.
% Set Accelerometer gain gainparts(filt,"Accelerometer",9.6335e-09) % Set Magnetometer gain gainparts(filt,"Magnetometer",0.01) % Set GPS gain gainparts(filt,"GPS",0.039246)
Fuse the sensor data using the filter. The filter estimates pose (orientation and position) and velocity. Extract the estimated position.
outTT = estimateStates(filt,sensorData); estPos = outTT.Position;
Calculate the position RMS error.
posErr = truePos - estPos;
pRMS = sqrt(mean(posErr.^2));
fprintf("Position RMS Error:\tX: %.3f, Y: %.3f, Z: %.3f (meters) \n", pRMS(1),pRMS(2),pRMS(3))Position RMS Error: X: 0.372, Y: 0.493, Z: 0.303 (meters)
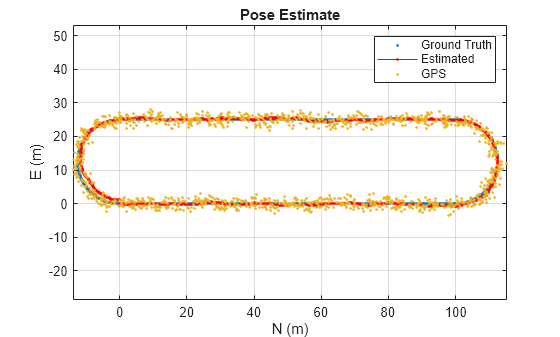
Visualize the estimated pose against the ground truth and GPS data.
figure plot(truePos(:,1),truePos(:,2),".") hold on plot(estPos(:,1),estPos(:,2),"r.-") gpsLocal = lla2ned(sensorData.GPS,localOrigin,"flat"); plot(gpsLocal(:,1),gpsLocal(:,2),".") title("Pose Estimate") legend("Ground Truth","Estimated","GPS") grid on xlabel("N (m)") ylabel("E (m)") axis equal
Extended Capabilities
Version History
Introduced in R2026a