nodeEstimates
Poses of nodes in pose graph
Description
measurements = nodeEstimates(poseGraph)
measurements = nodeEstimates(poseGraph,nodeIDs)
Examples
Create a 2-D pose graph object.
pg = poseGraph;
Add relative poses to the pose graph.
addRelativePose(pg,[1 1 pi/2]); addRelativePose(pg,[2 2 pi/3]);
Add a landmark point node to the last pose node in the pose graph.
addPointLandmark(pg,[1 1]); show(pg);
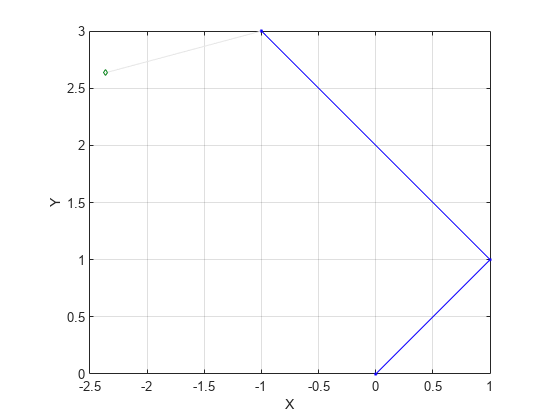
List all poses in the pose graph.
nodeEstimates(pg)
ans = 4×3
0 0 0
1.0000 1.0000 1.5708
-1.0000 3.0000 2.6180
-2.3660 2.6340 NaN