contopptraj
Syntax
Description
Note
The contopptraj function requires Optimization Toolbox™.
[
generates a trajectory by fitting a path to a set of waypoints
q,qd,qdd,t] = contopptraj(waypoints,vellim,accellim)waypoints. The function returns a time-optimal trajectory along the
path for position q, velocity qd, and
acceleration qdd at sample times t, while
constrained by the velocity vellim and acceleration limits
accellim.
[___] = contopptraj(___,NumSamples=
specifies the number of samples to use when generating the trajectory, in addition to any
combination of arguments from previous syntaxes.N)
[___,
outputs solution information solninfo] = contopptraj(___)solninfo with diagnostic information
associated with the output trajectory, in addition to any combination of arguments from
previous syntaxes.
Examples
Create waypoints, velocity limits, and acceleration limits.
waypoints = [0 5 10 -10; 0 8 -10 5; 0 -10 15 5]; velLimits = [-1 1; -2 2; -3 3]; accelLimits = [-1 1; -2 2; -3 3];
Generate the position, velocity, acceleration, and time vector of the trajectory with 200 samples.
[q,qd,qdd,t] = contopptraj(waypoints,velLimits,accelLimits,NumSamples=200);
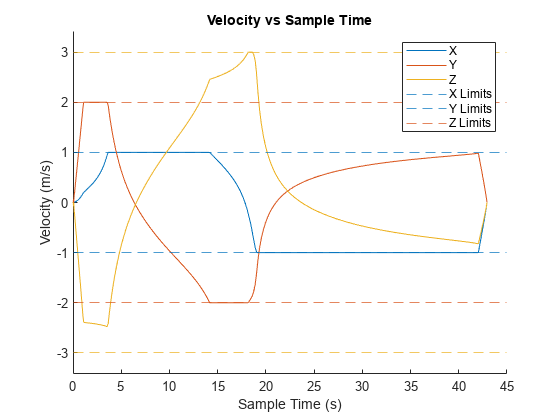
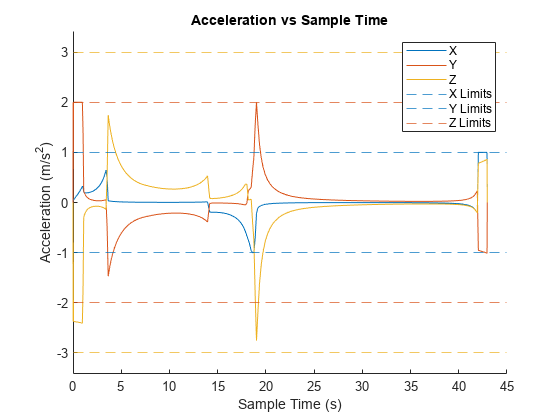
Plot the positions, velocities, and accelerations against the sample times t.
figure title("Position vs Sample Time") ylim("padded") hold on q = real(q); qd = real(qd); qdd = real(qdd); t = real(t); plot(t,q(1,:)) % X Position plot(t,q(2,:)) % Y Position plot(t,q(3,:)) % Z Position xlabel("Sample Time (s)") ylabel("Position (m)") legend(["X","Y","Z"]) hold off

helperPlotConstrainedTrajectory(qd,t,velLimits,"Velocity") ylabel("Velocity (m/s)")
helperPlotConstrainedTrajectory(qdd,t,accelLimits,"Acceleration") ylabel("Acceleration (m/s^2)")
Input Arguments
Output Arguments
References
[1] Pham, Hung, and Quang-Cuong Pham. “A New Approach to Time-Optimal Path Parameterization Based on Reachability Analysis.” IEEE Transactions on Robotics, 34, no. 3 (June 2018): 645–59. https://doi.org/10.1109/TRO.2018.2819195.
Extended Capabilities
Version History
Introduced in R2022b