bandpass
对信号进行带通滤波
语法
说明
y = bandpass(___,Name=Value)
[ 还返回用于对输入进行滤波的 y,d] = bandpass(___)digitalFilter 对象 d。
不带输出参量的 bandpass(___) 绘制输入信号并叠加滤波后的信号。
示例
创建一个信号,其采样率为 1 kHz,采样时间持续 1 秒。该信号包含三个音调,其频率分别为 50 Hz、150 Hz 和 250 Hz。高频和低频音调的振幅都是中频音调的两倍。信号嵌入在方差为 1/100 的高斯白噪声中。
fs = 1e3; t = 0:1/fs:1; x = [2 1 2]*sin(2*pi*[50 150 250]'.*t) + randn(size(t))/10;
对信号进行带通滤波以去除低频和高频音调。指定 100 Hz 和 200 Hz 的通带频率。显示原始信号和滤波后的信号及其频谱。
bandpass(x,[100 200],fs)
![Figure contains 2 axes objects. Axes object 1 with title Bandpass Filtering (Fpass = [100 200] Hz), xlabel Time (s) contains 2 objects of type line. These objects represent Original, Filtered. Axes object 2 with xlabel Frequency (Hz), ylabel Power Spectrum (dB) contains 2 objects of type line. These objects represent Original, Filtered.](../../examples/signal/win64/BandpassFilteringOfTonesExample_01.png)
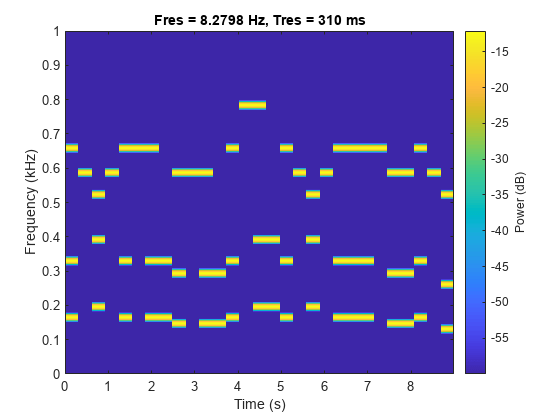
实现基本的数字音乐合成器,并用它播放一首传统歌曲。指定采样率为 2 kHz。绘制歌曲的频谱图。
fs = 2e3; t = 0:1/fs:0.3-1/fs; fq = [-Inf -9:2]/12; note = @(f,g) [1 1 1]*sin(2*pi*440*2.^[fq(g)-1 fq(g) fq(f)+1]'.*t); mel = [5 3 1 3 5 5 5 0 3 3 3 0 5 8 8 0 5 3 1 3 5 5 5 5 3 3 5 3 1]+1; acc = [5 0 8 0 5 0 5 5 3 0 3 3 5 0 8 8 5 0 8 0 5 5 5 0 3 3 5 0 1]+1; song = []; for kj = 1:length(mel) song = [song note(mel(kj),acc(kj)) zeros(1,0.01*fs)]; end song = song/(max(abs(song))+0.1); % To hear, type sound(song,fs) pspectrum(song,fs,"spectrogram",TimeResolution=0.31, ... OverlapPercent=0,MinThreshold=-60)
对信号进行带通滤波以将中音区与其他两个音区分离。指定 230 Hz 和 450 Hz 的通带频率。在时域和频域中绘制原始信号和滤波后的信号。
pong = bandpass(song,[230 450],fs);
% To hear, type sound(pong,fs)
bandpass(song,[230 450],fs)![Figure contains 2 axes objects. Axes object 1 with title Bandpass Filtering (Fpass = [230 450] Hz), xlabel Time (s) contains 2 objects of type line. These objects represent Original, Filtered. Axes object 2 with xlabel Frequency (kHz), ylabel Power Spectrum (dB) contains 2 objects of type line. These objects represent Original, Filtered.](../../examples/signal/win64/BandpassFilteringOfMusicalSignalExample_02.png)
绘制中音区的频谱图。
figure pspectrum(pong,fs,"spectrogram",TimeResolution=0.31, ... OverlapPercent=0,MinThreshold=-60)

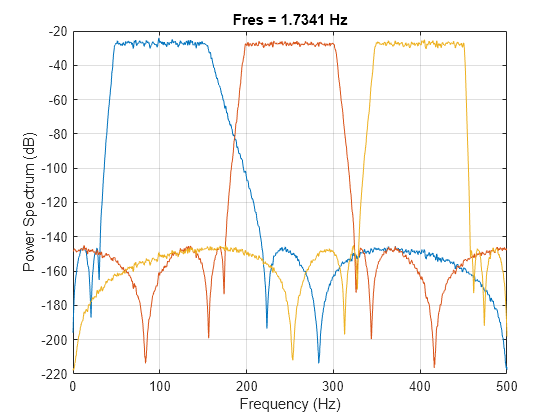
使用通带宽度为 100 Hz 的无限冲激响应带通滤波器对以 1 kHz 频率采样的白噪声进行滤波。使用不同陡度值。绘制滤波后的信号的频谱。
fs = 1000; x = randn(20000,1); [y1,d1] = bandpass(x,[ 50 150],fs,ImpulseResponse="iir",Steepness=0.5); [y2,d2] = bandpass(x,[200 300],fs,ImpulseResponse="iir",Steepness=0.8); [y3,d3] = bandpass(x,[350 450],fs,ImpulseResponse="iir",Steepness=0.95); pspectrum([y1 y2 y3],fs) legend("Steepness = " + [0.5 0.8 0.95],Location="south")

计算并绘制滤波器的频率响应。
[h1,f] = freqz(d1,1024,fs); [h2,~] = freqz(d2,1024,fs); [h3,~] = freqz(d3,1024,fs); plot(f,mag2db(abs([h1 h2 h3]))) legend("Steepness = " + [0.5 0.8 0.95],Location="south") ylim([-100 10])

通过在通带低频和高频处指定不同陡度值使滤波器不对称。
[y1,d1] = bandpass(x,[ 50 150],fs,ImpulseResponse="iir",Steepness=[0.5 0.8]); [y2,d2] = bandpass(x,[200 300],fs,ImpulseResponse="iir",Steepness=[0.5 0.8]); [y3,d3] = bandpass(x,[350 450],fs,ImpulseResponse="iir",Steepness=[0.5 0.8]); pspectrum([y1 y2 y3],fs)
计算并绘制滤波器的频率响应。
[h1,f] = freqz(d1,1024,fs); [h2,~] = freqz(d2,1024,fs); [h3,~] = freqz(d3,1024,fs); plot(f,mag2db(abs([h1 h2 h3]))) ylim([-100 10])

输入参数
名称-值参数
输出参量
详细信息
版本历史记录
在 R2018a 中推出