filtfilt
零相位数字滤波
语法
说明
y = filtfilt(d,x)d 对输入数据 x 进行零相位滤波。使用 designfilt 根据频率响应设定生成 d。
y = filtfilt(B,A,x,"ctf")B 和 A)定义的Cascaded Transfer Functions (CTF) 对输入数据 x 进行滤波。 (自 R2024b 起)
注意
当您将 A 指定为标量或向量时,指定 "ctf" 选项以将具有六列的 CTF 分子矩阵 B 与二阶节矩阵输入 sos 区分开来。
y = filtfilt(___,Name=Value)
示例
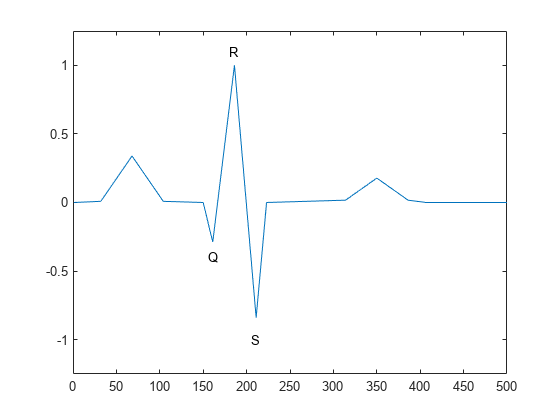
零相位滤波有助于将滤波后的时间波形中的特征准确地保留在它们在未经滤波的信号中出现的位置。
对合成心电图 (ECG) 波形进行零相位滤波。生成波形的函数在示例的末尾。QRS 复波是 ECG 的一个重要特征。如下图所示,它在时间点 160 左右开始。
wform = ecg(500); plot(wform) axis([0 500 -1.25 1.25]) text(155,-0.4,"Q") text(180,1.1,"R") text(205,-1,"S")
用加性噪声损坏 ECG。重置随机数生成器以获得可重现的结果。构造一个低通 FIR 等波纹滤波器,并使用零相位滤波和传统滤波对含噪波形进行滤波。
rng("default") x = wform' + 0.25*randn(500,1); d = designfilt("lowpassfir", ... PassbandFrequency=0.15,StopbandFrequency=0.2, ... PassbandRipple=1,StopbandAttenuation=60, ... DesignMethod="equiripple"); y = filtfilt(d,x); y1 = filter(d,x); tiledlayout("flow") nexttile plot([y y1]) title("Filtered Waveforms") legend(["Zero-phase Filtering" "Conventional Filtering"]) nexttile plot(wform) title("Original Waveform")
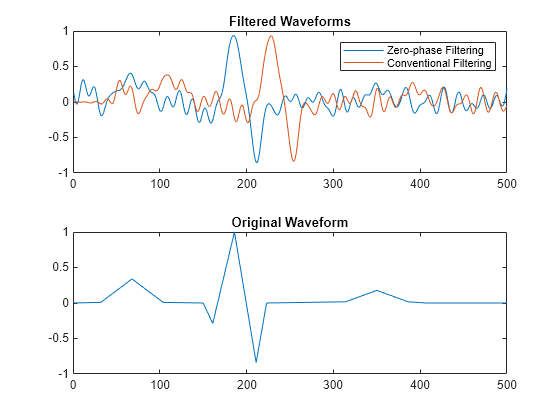
零相位滤波可减少信号中的噪声,并在原始信号中出现 QRS 复波的同时保留该复波。传统滤波可减少信号中的噪声,但会使 QRS 复波延迟。
使用巴特沃斯二阶节滤波器重复进行滤波。
d1 = designfilt("lowpassiir",FilterOrder=12, ... HalfPowerFrequency=0.15,DesignMethod="butter"); y = filtfilt(d1,x); figure plot(x) hold on plot(y,LineWidth=3) hold off legend(["Noisy ECG" "Zero-Phase Filtering"])

此函数生成 ECG 波形。
function x = ecg(L) %ECG Electrocardiogram (ECG) signal generator. % ECG(L) generates a piecewise linear ECG signal of length L. % % EXAMPLE: % x = ecg(500).'; % y = sgolayfilt(x,0,3); % Typical values are: d=0 and F=3,5,9, etc. % y5 = sgolayfilt(x,0,5); % y15 = sgolayfilt(x,0,15); % plot(1:length(x),[x y y5 y15]); % Copyright 1988-2002 The MathWorks, Inc. a0 = [0,1,40,1,0,-34,118,-99,0,2,21,2,0,0,0]; % Template d0 = [0,27,59,91,131,141,163,185,195,275,307,339,357,390,440]; a = a0/max(a0); d = round(d0*L/d0(15)); % Scale them to fit in length L d(15)=L; for i=1:14 m = d(i):d(i+1)-1; slope = (a(i+1)-a(i))/(d(i+1)-d(i)); x(m+1) = a(i)+slope*(m-d(i)); end end
自 R2024b 起
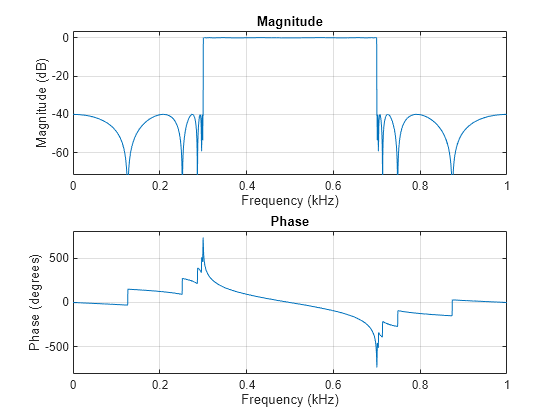
使用级联传递函数执行零相位滤波。
设计一个椭圆滤波器,通带波纹和阻带衰减分别为 0.1 dB 和 40 dB。指定采样率为 2000 Hz。绘制滤波器的频率响应。
Fs = 2000; [B,A] = ellip(20,0.1,40,[0.3 0.7],"ctf"); freqz(B,A,2048,Fs,"ctf")
对线性扫频啁啾信号进行滤波,其中奈奎斯特频率出现在一秒处。比较输入和输出信号的频谱。
t = 0:1/Fs:1;
x = chirp(t,0,t(end),Fs/2)';
y = filtfilt(B,A,x,"ctf");
pspectrum([x y],Fs,Leakage=1,FrequencyResolution=1)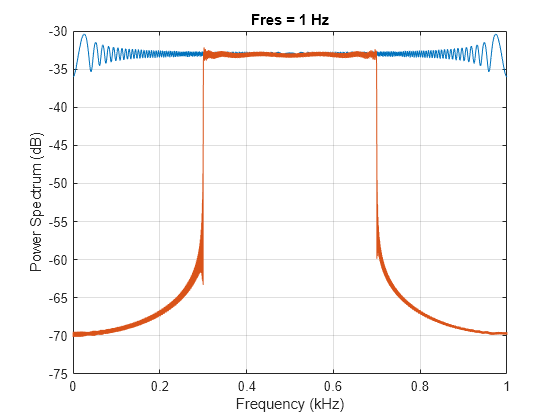
自 R2024b 起
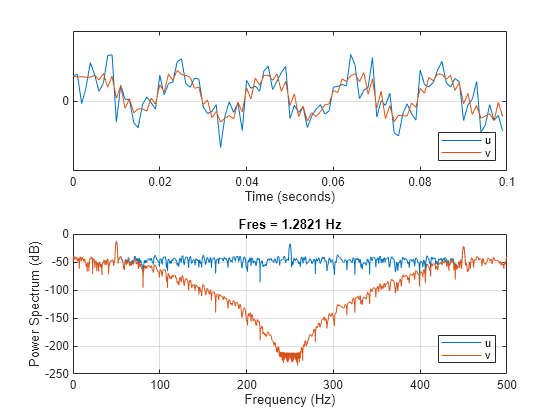
用传递函数零相位滤波重新生成含噪正弦波伪影。使用 CTF 和尺度值对振荡信号进行滤波。
创建一个由正态分布噪声和三个正弦波形组成的信号 u。采样率为 1 kHz。
rng("default")
Fs = 1e3;
ts = (0:1/Fs:2)';
a0 = [3 2 1];
f0 = [0.1 0.5 0.9]*Fs/2;
p0 = [0 pi/4 pi/2];
u = 0.1*randn(size(ts)) + 0.1*sin(2*pi*f0.*ts+p0)*a0';通过使用三阶巴特沃斯带阻数字滤波器对 n0 进行滤波,重新生成含噪正弦波伪影,并创建信号 v。
[b,a] = butter(3,[0.15 0.85],"stop");
v = filtfilt(b,a,u);比较 u 和 v。注意两个信号同相。
tiledlayout("flow") nexttile strips([u(ts<0.1) v(ts<0.1)],0.1,Fs) legend(["u" "v"],Location="southeast") xlabel("Time (seconds)") nexttile pspectrum([u v],Fs) legend(["u" "v"],Location="southeast")
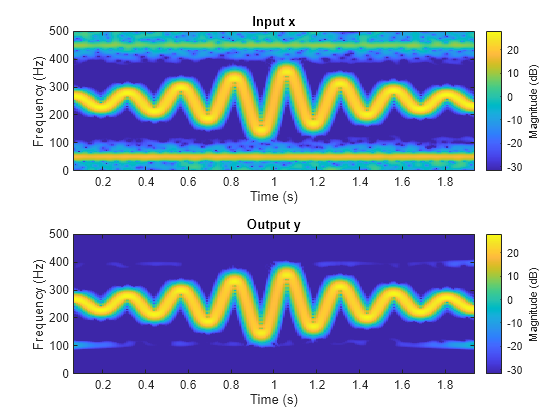
生成一个电压控制的振荡信号 x。添加由信号 v 表示的含噪正弦波伪影。
vo = exp(-2*abs(ts-1)).*sin(8*pi*ts); x = vco(vo,[0.25 0.75]*Fs/2,Fs) + v;
用 24 阶切比雪夫 II 型滤波器对信号 x 进行滤波。使用 CTF 格式和尺度值 (B,A,g)。
[B,A,g] = cheby2(24,50,[0.2 0.8],"ctf");
y = filtfilt({B,A,g},x);比较短时傅里叶变换的幅值平方。观察幅值在阻带处急剧下降。
tiledlayout("flow") nexttile stft(x,Fs,Window=bohmanwin(128),OverlapLength=120, ... FFTLength=512,FrequencyRange="onesided") title("Input x") nexttile stft(y,Fs,Window=bohmanwin(128),OverlapLength=120, ... FFTLength=512,FrequencyRange="onesided") title("Output y")
自 R2026a 起
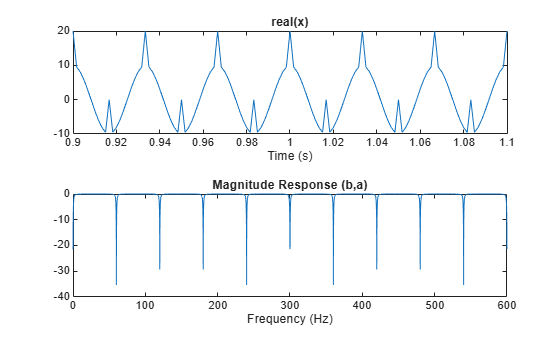
对具有多个谐波的复数值 30 Hz 正弦音应用零相位滤波,谐波间隔为 60 Hz,最高延伸至 600 Hz。
创建一个采样率为 600 Hz 的两秒复数值信号。该信号包含一个 10 V 30 Hz 正弦音,并具有 10 个谐波,频率从 60 Hz 到 600 Hz 均匀分布,振幅各为 1 V。
Fs = 600; t = (0:1/Fs:2)'; x = 10*exp(1i*2*pi*30*t) + sum(exp(1i*2*pi*60*t*(0:9)),2);
由于音调在 30 Hz 处振荡,而不需要的分量在每隔 60 Hz 直到第十个倍频处有频率峰值,因此一个 10 阶 IIR 梳状陷波滤波器适用于还原音调,即感兴趣的信号。
将 b 和 a 定义为表示 10 阶 IIR 梳状陷波滤波器的分子系数和分母系数的向量,该滤波器的质量因子为 35。要了解有关设计具有特定阶数和质量因子的 IIR 梳状滤波器的更多信息,请参阅 iircomb (DSP System Toolbox)。
b = [0.957 zeros(1,9) -0.957]; a = [1 zeros(1,9) -0.914];
绘制从 0.9 到 1.1 秒的信号的实部。绘制从 0 到 600 Hz 的滤波器响应。
tiledlayout("flow") nexttile plot(t,real(x)) xlim([0.9 1.1]) xlabel("Time (s)") title("real(x)") nexttile [h,f] = freqz(b,a,8192,"whole",Fs); plot(f,mag2db(abs(h))) xlabel("Frequency (Hz)") title("Magnitude Response (b,a)")
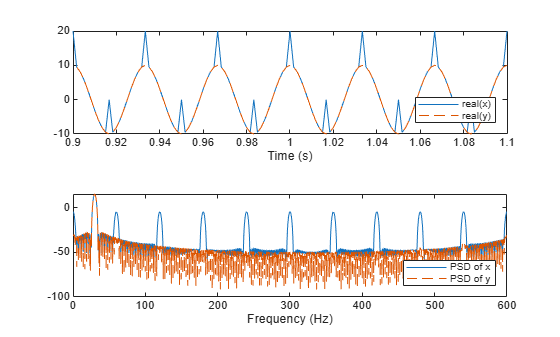
对输入信号进行滤波,同时保留相位。使用古斯塔夫森方法估计滤波器状态的初始条件。假设瞬变长度等于信号长度,并通过镜像采样来填充输入信号。
y = filtfilt(b,a,x, ... InitialStatesMethod="gustafsson", ... TransientLength=length(x), ... PaddingPattern="reflect");
比较时域和频域中的输入信号和滤波信号。绘制从 0.9 到 1.1 秒的两个信号的实部,以及从 0 到 600 Hz 的韦尔奇功率谱。滤波后的信号显示去除了谐波的 30 Hz 音调,同时滤波后的信号 y 与输入信号 x 同相。
figure; tiledlayout("vertical") nexttile plot(t,real(x),t,real(y),"--") legend("real(" + ["x" "y"] +")",Location="southeast") xlabel("Time (s)") xlim([0.9 1.1]) nexttile [p,f] = pwelch([x y],[],[],8192,Fs); pdb = pow2db(abs(p)); plot(f,pdb(:,1),"-",f,pdb(:,2),"--") xlabel("Frequency (Hz)") legend("PSD of " + ["x" "y"],Location="southeast")
输入参数
名称-值参数
输出参量
详细信息
提示
您可以获得 CTF 格式的滤波器,包括缩放增益。使用数字 IIR 滤波器设计函数的输出,例如 butter、cheby1、cheby2 和 ellip。在这些函数中指定 "ctf" 滤波器类型参量,并指定返回 B、A 和 g 以获取尺度值。 (自 R2024b 起)
参考
[1] Gustafsson, F. “Determining the initial states in forward-backward filtering.” IEEE® Transactions on Signal Processing. Vol. 44, April 1996, pp. 988–992. https://doi.org/10.1109/78.492552.
[2] Lyons, Richard G. Understanding Digital Signal Processing. Upper Saddle River, NJ: Prentice Hall, 2004.
[3] Mitra, Sanjit K. Digital Signal Processing. 2nd Ed. New York: McGraw-Hill, 2001.
[4] Oppenheim, Alan V., and Ronald W. Schafer, with John R. Buck. Discrete-Time Signal Processing. 2nd Ed. Upper Saddle River, NJ: Prentice Hall, 1999.