ctffilt
Syntax
Description
y = ctffilt(B,A,x)x using Cascaded Transfer Functions (CTF) defined by the numerator and denominator coefficients B and
A, respectively.
Examples
Specify a two-section digital filter with a transfer function . Plot the filter response.
B = [0.1607 0.2414 0.4689
0.1607 0.0828 0.0551];
A = [ 1 0 0;
1 -1.1940 0.4360];
freqz(B,A,1024,"ctf")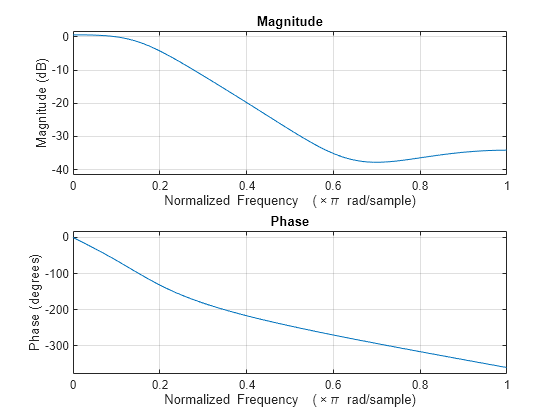
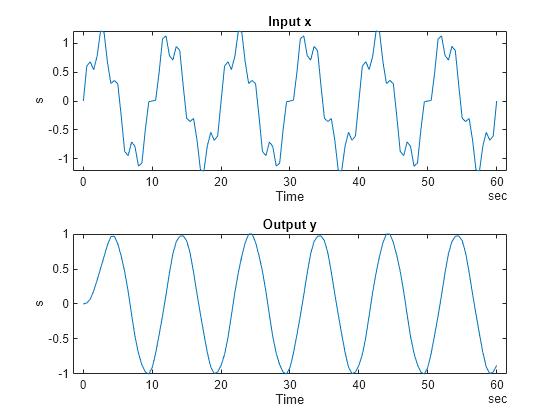
Filter a signal consisting of two sinusoidal waveforms with frequencies of 0.1 Hz and 0.45 Hz, sampled every half second over a duration of one minute. The amplitude of the 0.45 Hz waveform is 0.3 times the amplitude of the 0.1 Hz waveform.
t = (0:0.5:60)'; s = sin(2*pi*0.1*t)+0.3*sin(2*pi*0.45*t); x = timetable(seconds(t),s); y = ctffilt(B,A,x);
Compare the input and output signals in the time domain. Because the magnitude of the filter response at 0.1 Hz is 0 dB, the amplitude of the output signal y is as high as the amplitude of the 0.1 Hz waveform from the input signal x.
tiledlayout flow nexttile plot(x,"s") title("Input x") nexttile plot(y,"s") title("Output y")
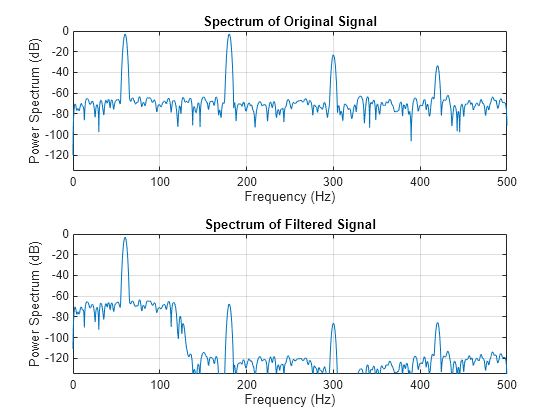
Generate a sinusoidal signal with an amplitude of 1 V and a frequency of 60 Hz, and add third-, fifth-, and seventh-order harmonics. The harmonic amplitudes are 1 V, 0.1 V, and 0.03 V, respectively. Sample the signal for 1 second at a sample rate of 1000 Hz.
rng default
Fs = 1000;
a = [1 1 0.1 0.03];
f = 60*[1 3 5 7];
t = (0:1/Fs:1)';
x = cos(2*pi*f.*t)*a' + 0.005*randn(size(t));Remove the third- and higher-order harmonic components from the mixed signal using a multisection lowpass elliptic filter. The cutoff frequency of the filter is 120 Hz.
Fc = 120;
wc = Fc/(Fs/2);
[num,den] = ellip(8,0.1,50,wc,"ctf");
y = ctffilt(num,den,x);Plot the power spectrum for the original and filtered signals. The second plot shows that the power of the filtered signal decreases significantly at frequencies above 120 Hz.
tiledlayout flow nexttile pspectrum(x,Fs) title("Spectrum of Original Signal") ylim([-135 0]) nexttile pspectrum(y,Fs) title("Spectrum of Filtered Signal") ylim([-135 0])
Design a fifth-order Butterworth bandpass filter represented as a cascade of fourth-order sections. The cutoff edge frequencies of the filter are 90 Hz and 150 Hz. The sample rate is 10 kHz.
Fs = 10000; Wn = [90 150]/(Fs/2); [B,A] = butter(5,Wn,"bandpass","ctf")
B = 3×5
0.0013 0.0026 0.0013 0 0
0.0013 0.0026 0 -0.0026 -0.0013
0.0013 -0.0052 0.0079 -0.0052 0.0013
A = 3×5
1.0000 -1.9578 0.9630 0 0
1.0000 -3.9289 5.7991 -3.8109 0.9408
1.0000 -3.9650 5.9071 -3.9191 0.9770
The number of rows and columns in B and A indicate that the resulting filter has three fourth-order sections. There is one more column than the degree of the section polynomials to include the coefficient of the term.
Since the order of each filter section is four, the initial condition states in each section must have four elements. You can specify a four-element vector to set up the same initial condition states for the three filter sections, or a 12-element vector to set up these states explicitly for each filter section.
Specify the initial condition states for all filter sections as zeros.
L = size(B,1); r = max(size(B,2),size(A,2))-1; numStates = L*r; zi = zeros(1,numStates);
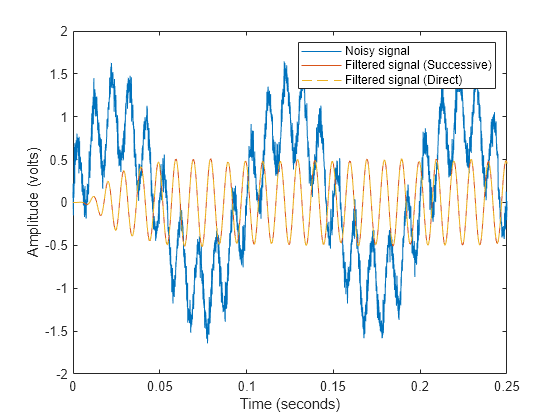
Perform successive filtering on a noisy sinusoid using the bandpass filter.
Partition the signal into frames. Each frame has 50 samples.
Filter each frame of the signal using the initial condition states and compute the final condition states. Use these final condition states as the initial condition states for the next frame.
Repeat the previous step until the entire signal is filtered.
rng default t = single(0:1/Fs:1-1/Fs); x = sin(2*pi*10*t) + 0.5*sin(2*pi*100*t) + 0.1*randn(size(t)); % Signal framing: fl = 50; % Frame length xFramed = framesig(x,fl); % Successive filtering across frames: ySuccessive = []; zf = zi; for nFrame = 1:size(xFramed,2) [yFrame,zf] = ctffilt(B,A,xFramed(:,nFrame)',zf); ySuccessive = [ySuccessive yFrame]; end
Filter the entire noisy signal in a single operation.
yDirect = ctffilt(B,A,x,zi);
Compare the noisy signal with the filtered signal for the first 0.25 seconds. Successive filtering across the signal frames yields the same result as filtering the entire signal once.
plot(t,x,t,ySuccessive,t,yDirect,"--") legend(["Noisy" "Filtered" "Filtered"]'+" signal" ... + ["" " (Successive)" " (Direct)"]') xlabel("Time (seconds)") ylabel("Amplitude (volts)") xlim([0 0.25])
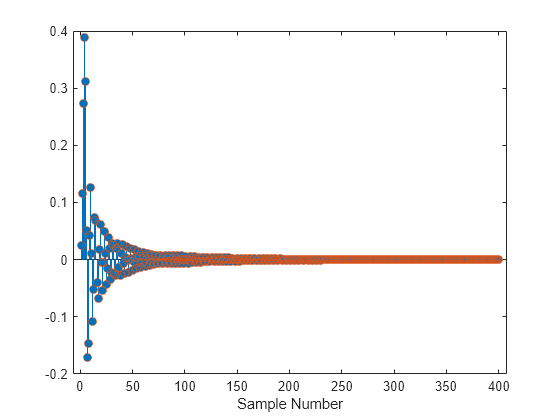
Design an eighth-order lowpass elliptic filter by specifying the sample rate Hz , cutoff frequency 2000 Hz, passband ripple 0.5 dB, and stopband attenuation 60 dB. Then, design an impulse signal with 400 samples.
% Filter design Fs = 8192; Wn = 2000/(Fs/2); [num,den,sv] = ellip(8,0.5,60,Wn,"ctf"); % Impulse signal Ns = 400; x = [1;zeros(Ns-1,1)];
Derive the impulse response of the elliptic filter by filtering the impulse signal x and by computing the filter response.
% Filter impulse signal h = ctffilt({num,den,sv},x); % Compute filter impulse response hImp = impz({num,den,sv},"ctf",Ns);
Compare the impulse responses. Both approaches yield the same result.
stem(h,"filled") hold on scatter(1:Ns,hImp) hold off xlabel("Sample Number")
Design a three-section decimate-by-five cascaded integrator-comb (CIC) filter. Each section has a unit differential delay. Plot the frequency response of the cascaded transfer function.
N = 1; % Differential delay D = 5; % Decimation factor K = 3; % Number of sections num = repmat([1 zeros(1,N*D-1) -1],K,1)
num = 3×6
1 0 0 0 0 -1
1 0 0 0 0 -1
1 0 0 0 0 -1
den = repmat([1 -1],K,1)
den = 3×2
1 -1
1 -1
1 -1
freqz(num,den,"ctf")
Compute the 100-sample impulse and step responses of the CIC filter. Use the Dimension input argument to compute the filter responses using a multichannel signal structure x.
Ns = 100; xImpl = [1 zeros(1,Ns-1)]; xStep = ones(1,Ns); x = [xImpl;xStep]; y = ctffilt(num,den,x,Dimension=2);
Downsample and plot the decimated filter responses. Normalize the responses with respect to their maxima.
yDec = downsample(y',D); plot(yDec./max(yDec),"*-") xlabel("Sample Number") title("Decimated Filter Responses") legend(["Impulse" "Step"])

Input Arguments
Output Arguments
More About
Tips
You can obtain filters in
CTF format, including the scaling gain. Use the outputs of digital IIR filter design functions,
such as butter, cheby1, cheby2, and ellip. Specify the "ctf" filter-type argument in these
functions and specify to return B, A, and
g to get the scale values. (since R2024b)
Algorithms
The ctffilt function uses the transposed direct form II structure
to implement the filter from the coefficients and gain in the cascaded transfer function
format.
Assume that the filter has l sections with coefficients bli and alj, derived from the matrices B,A in the CTF format, and
the scale value(s) g. The values i – 1 and j – 1 denote the exponents of z of the numerator and
denominator polynomials in the z-domain, respectively. The
ctffilt function normalizes ali and bli to αli and βli, respectively, ensuring that αl1 equals unity.
When you specify g as a scalar,
ctffilt assumes that g=gS, and the term gl does not apply in the normalization of the filter coefficients βli.
If the orders of the polynomial numerators and denominators are given as m and n, respectively, the filter has r = max(m,n) states per section. These states are located at the outputs of each z-1 delay block in the filter implementation diagram.
When you specify
zias a vector withrelements,ctffiltinitializes the filter states by setting ν1k = ν2k = … = νLk =zi(k)for k = 1, 2, …, r.When you specify
zias a vector, matrix, or multidimensional array withL*relements in its leading dimension,ctffiltinitializes the filter states by setting νlk =zi((l-1)*r+k)for k = 1, 2, …, r and l = 1, 2, …, L.
For each sample of x across the first array dimension whose size is
greater than 1 or across the dimension dim that you specify as
Dimension=dim, the ctffilt function computes
y by following the filter implementation based on the transposed direct
form II structure, updates the filter states νlk, and repeats this operation until it finishes filtering the last sample of
x.
When you specify to return
zf,ctffiltgathers the states νlk computed during the filtering of the last sample ofx, and stores them inzfaszf((l-1)*r+k)= νlk, for k = 1, 2, …, r and l = 1, 2, …, L.
References
[1] Lyons, Richard G. Understanding Digital Signal Processing. Upper Saddle River, NJ: Prentice Hall, 2004.
Extended Capabilities
Version History
Introduced in R2024b