filtic
转置直接 II 型滤波器实现的初始条件
说明
示例
确定以下方程组的零输入响应:,初始条件为 。设置分子系数和分母系数以及输出的初始条件。
b = [0.1 0.2]; a = [1 1.12]; Y = 1;
计算系统的零输入初始条件。
xic = filtic(b,a,Y);
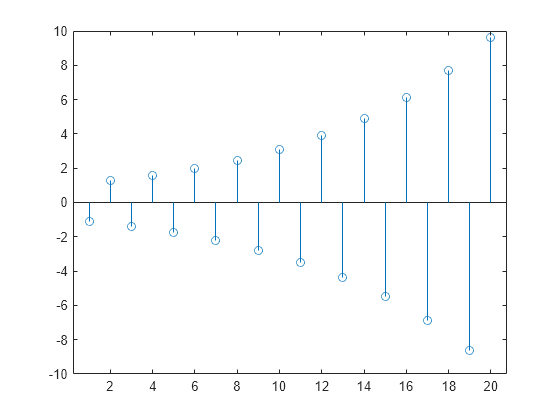
计算零输入响应。
yzi = filter(b,a,zeros(1,20),xic); stem(yzi)
输入参数
输出参量
算法
filtic 函数执行反向差分方程以获取延迟状态 w。x 中超出 x(n-1) 的元素和 y 中超出 y(m-1) 的元素是不必要的,因此 filtic 会忽略它们。
转置直接 II 型结构如下图所示,其中 n - 1 是滤波器阶数。如果您的反馈和前馈滤波器阶数不同,您可以将较高阶的项视为 0。例如,对于具有 a = [1 2] 和 b = [2 3 2 4] 的滤波器,您可以假设 a = [1 2 0 0]。
参考
[1] Oppenheim, A.V., and R.W. Schafer, Discrete-Time Signal Processing, Prentice-Hall, 1989, pp. 296, 301-302.
扩展功能
版本历史记录
在 R2006a 之前推出