phasez
Phase response of digital filter
Syntax
Description
Examples
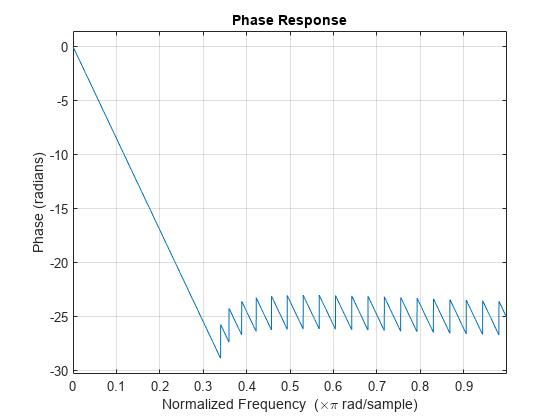
Use designfilt to design an FIR filter of order 54, normalized cutoff frequency rad/s, passband ripple 0.7 dB, and stopband attenuation 42 dB. Use the method of constrained least squares. Display the phase response of the filter.
Nf = 54; Fc = 0.3; Ap = 0.7; As = 42; d = designfilt('lowpassfir','CutoffFrequency',Fc,'FilterOrder',Nf, ... 'PassbandRipple',Ap,'StopbandAttenuation',As, ... 'DesignMethod','cls'); phasez(d)
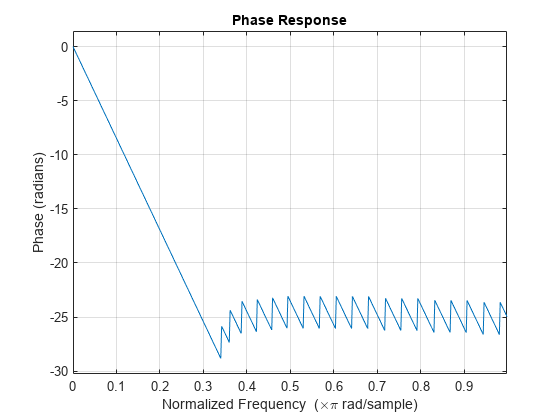
Design the same filter using fircls1. Keep in mind that fircls1 uses linear units to measure the ripple and attenuation.
pAp = 10^(Ap/40); Apl = (pAp-1)/(pAp+1); pAs = 10^(As/20); Asl = 1/pAs; b = fircls1(Nf,Fc,Apl,Asl); phasez(b)
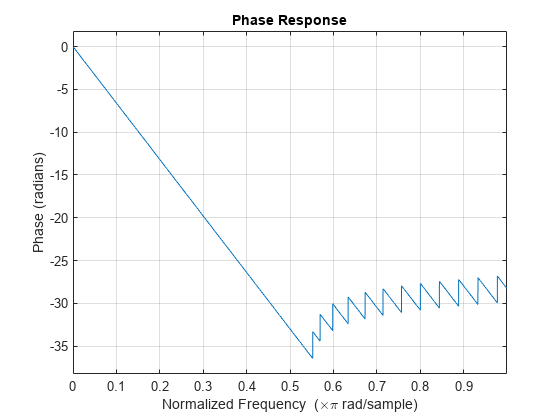
Design a lowpass equiripple filter with normalized passband frequency rad/s, normalized stopband frequency rad/s, passband ripple 1 dB, and stopband attenuation 60 dB. Display the phase response of the filter.
d = designfilt('lowpassfir', ... 'PassbandFrequency',0.45,'StopbandFrequency',0.55, ... 'PassbandRipple',1,'StopbandAttenuation',60, ... 'DesignMethod','equiripple'); phasez(d)
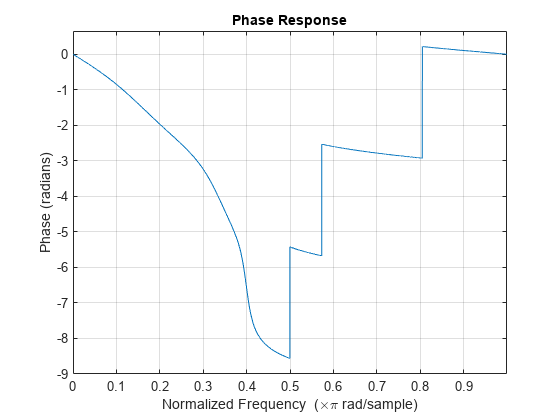
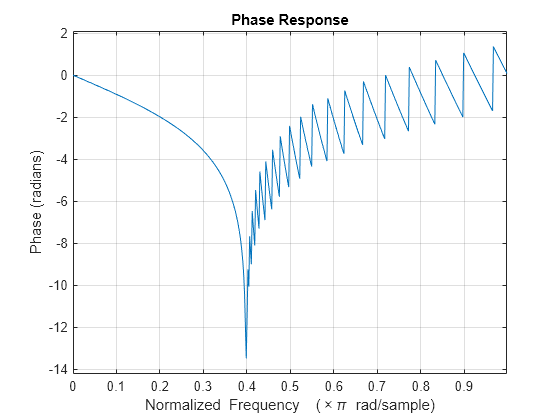
Design an elliptic lowpass IIR filter with normalized passband frequency rad/s, normalized stopband frequency rad/s, passband ripple 1 dB, and stopband attenuation 60 dB. Display the phase response of the filter.
d = designfilt('lowpassiir', ... 'PassbandFrequency',0.4,'StopbandFrequency',0.5, ... 'PassbandRipple',1,'StopbandAttenuation',60, ... 'DesignMethod','ellip'); phasez(d)
Since R2024b
Design a 40th-order lowpass Chebyshev type II digital filter with a stopband edge frequency of 0.4 and stopband attenuation of 50 dB. Plot the phase response of the filter using its coefficients in the CTF format.
[B,A] = cheby2(40,50,0.4,"ctf"); phasez(B,A,"ctf")
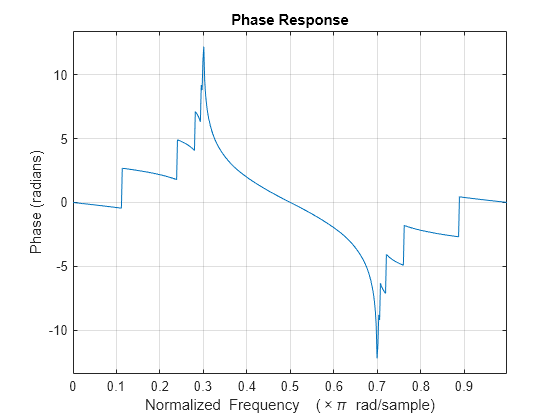
Design a 30th-order bandpass elliptic digital filter with passband edge frequencies of 0.3 and 0.7, passband ripple of 0.1 dB, and stopband attenuation of 50 dB. Plot the phase response of the filter using its coefficients and gain in the CTF format.
[B,A,g] = ellip(30,0.1,50,[0.3 0.7],"ctf"); phasez({B,A,g},"ctf")
Input Arguments
Output Arguments
More About
Tips
You can obtain filters in
CTF format, including the scaling gain. Use the outputs of digital IIR filter design functions,
such as butter, cheby1, cheby2, and ellip. Specify the "ctf" filter-type argument in these
functions and specify to return B, A, and
g to get the scale values. (since R2024b)
References
[1] Lyons, Richard G. Understanding Digital Signal Processing. Upper Saddle River, NJ: Prentice Hall, 2004.